跟着博主的脚步,每天进步一点点
之前写过CRF的详解,只是为了让大家详细了解下原理,但是那种是没有优化的,速度很慢。在实际应用中,还是需要用到batch,也就是需要用到GPU的,那么此时并行计算就变得极为重要。在研究到一定的程度上,困住你的不是算法本身,而是时间。同一件事,当然是越快越好。此时困住你的就是加速问题。
我认为的加速大概分为两种:
- 算法的本身的速度。
- 程序中的循环怎么改为矩阵计算,也就是并行计算。
这里先以条件随机场CRF为例,详细讲解CRF原理和如何加速的并行计算。
下面的所有图,公式都由本人zenRRan原创
1.概述
CRF(Conditional Random Field),中文被翻译为条件随机场。经常被用于 序列标注,其中包括词性标注,分词,命名实体识别等领域。但是为什么 叫这个名字呢?下面看完了基本也就明白了!那我们继续吧。
2.理论
我们以词性标注为例,先介绍下词性标注的概念:

这个表示 词:词性,分别为 我:PN,去:V V ,北京:NN。
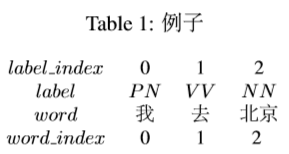
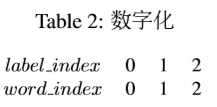
Table1就是word和label数字化后变成word index,label index。最终就 变成Table2的形式:
上述是标准金标,也就是正确答案,但是实际上电脑预测的不会是正 确的。因为label有3种,每一个字被预测的label就有3种可能,为了数字化 这些可能,我们从word index 到label index 设置一种分数,叫做发射分 数emit,简化为E。
word index 的2到label index的2,像不像发射上去的?此时的分数就记 作发射分数E[2][2]。
另外,我们想想,如果单单就这个发射分数来评价,太过于单一了, 因为这个是一个序列,比如前面的label为1代表V V 动词,那此时的label被 预测的肯定不能是V V ,因为动词后面不能接动词,所以知道前一个label转 向后一个label可能性会增加准确率,所以这个时候就需要一个分数代表前 一个label 到此时label 的分数,我们叫这个为转移分数,即T。如图,横 向的label到label,就是由一个label到另一个label转移的意思,此时的分数 为T[1][1]。
假设word index = i到label index = j的分数为s[i][j],则
s[0][0] = E[0][0]
因为word index = 0前面没有word index了,所以s[0][0]就为发射分数E[0][0]。word index = 1到label index = 1的分数s[1][1]为E[1][1]+T[0][1]。但是CRF 为了全局考虑,将前一个的分数也累加到当前分数上,这样更能表达出已 经预测的序列的整体分数,则:
s[1][1] = s[0][0] + E[1][1] + T[0][1]
所以,s[2][2]也就很容易了:
s[2][2] = E[0][0] + E[1][1] + T[0][1] + E[2][2] + T[1][2]
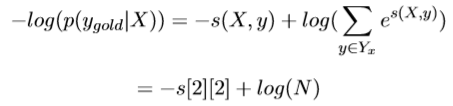
因为s[2][2]已经为最后的词的的分数,所以该s[2][2]为金标score({我 去 北 京},{PN VV NN})即score({0 1 2},{0 1 2})的最终得分。最后的公式总结为:
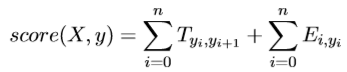
其中X为word index序列,y为预测的label index序列。
因为这个预测序列有很多种,种类为label的可重复排列组合大小。其中 只有一种组合是对的,我们只想通过神经网络训练使得对的score的比重在总体的所有score的越大越好。而这个时候我们一般softmax化,即:
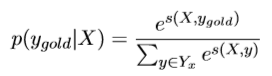
其中分子中的s为label序列为正确序列的score,分母为每种可能的score的 总和。
这个比值越大,我们的预测就越准,所以,这个公式也就可以当做我们 的loss,可是loss一般都越小越好,那我们就对这个加个负号即可,但是这个最终结果是趋近于1的,我们实验的结果是趋近于0的,这时候log就派上 用场了,即:
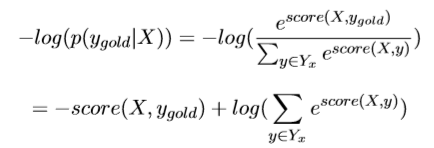
当然这个log也有平滑结果的功效。
3.计算所有路径的得分
loss的分子在上面已经求出来了,现在就差分母了,而计算所有预测序列可能的得分和也就是计算所有路径的得分。我们第一种想法就是每一种可 能都求出来,然后累加即可。可是,比如word序列长为10,label种类为7, 那么总共需要计算10^7次,这样的计算太耗时间了。那么怎么计算的时间快呢?这里有一种方法,就是每个节点记录之前所有节点到当前节点的路径 总和。如图:
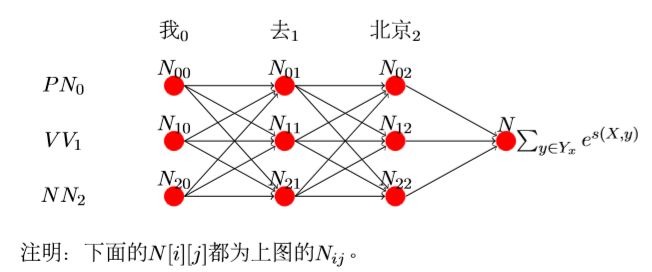
解释下这个图:
第一列:
首先说下,因为‘我’是第一列,前面没有别的词,所以就不用加上前 面的值。继续说,N[0][0]表示‘我’选择PN的得分,N[1][0]表示‘我’选 择V V 的得分,N[2][0]表示‘我’选择NN的得分而该得分只有发射得分,所以为:
N[0][0] = E[0][0]
同理,得:
N[1][0] = E[0][1] N[2][0] = E[0][2]
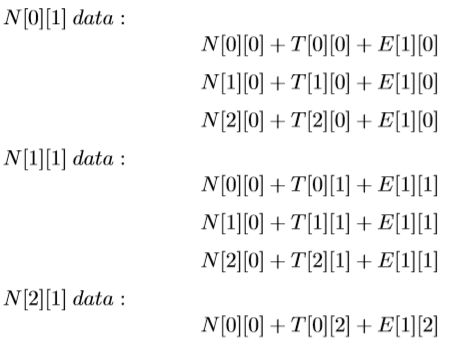
再来分析第二列:
N[0][1]表示前一个选择PN的得分+‘去’选择PN的得分(‘去’选 择PN的得分为T[0][0]+E[1][0]),前一个选择V V 的得分+加上‘去’选 择PN 的得分,加上前一个选择NN的得分+‘去’选择PN的得分。公式为:

类推:

再类推第三列:
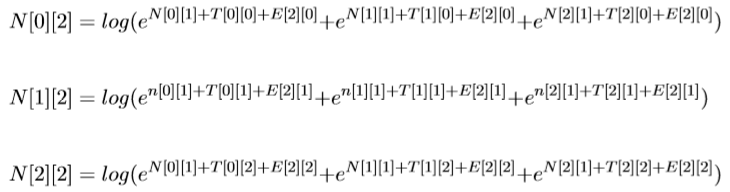
最后一列求完了,因为每个节点都包含了该节点之前所有节点到该节点的 可能路径,因为现在的

的总和就是所有路径的总和,也就是我们要求的损失函数里面的
即为:

4.得出具体损失函数
最终的我们的损失函数求出来了:
这样我们就能根据损失函数反向传播梯度,更新T E参数了。
5.batch
上面的那种求总和的方法,还有一种好处就是可以加快并行计算,也就刚 好能做多个句子的batch批处理。先说什么是并行计算,字面意思就能理 解,并行,并排行进,大家同时进行的意思,同时进行的前提条件是需要 用到的东西都已经准备好。放在计算机里的意思就是当前运行的程序需要 的数据都已经准备好了。那我们来看看我们的数据怎么能并行计算吧,我 拿出来一列数据来看看(先说下为什么拿出的是一列,而不是一行,因为 一列所需要的数据前一列都已经计算过了,而一行不具备这样的条件), 比如第二列:

但是这样或许看不到什么效果,我来整理下,去掉log,去掉e,只提取数 据:

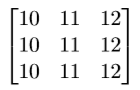
我们先看N这三组数据,发现每组里面N都是一样都为N[0][0],N[1][0],N[2][0], 所以我们可以设定矩阵N为:

我们看到矩阵N第0维循环变化,第1维不变,但是上面的只是一组数据, 我们需要三组,所以我们对该N进行二维扩展,也就是列复制:

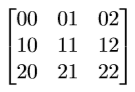
再看T,第一组为T[0][0],T[1][0],T[2][0],第二组为T[0][1],T[1][1],T[2][1], 第三组为T[0][2],T[1][2],T[2][2]。我们能其实够很明显的看出第一组为T的3∗ 3矩阵第0列,剩下的分别为第1列,第2列,即矩阵T为:
最后同理我们看E,我们会观察到它和N的情况相似,但是E第0维不变, 第1维是循环变化,所以是行复制:
我们会发现,矩阵N T E的第一列按位相加的结果刚好是N[0][1],同理的,第二列,第三列分别按位相加分别得N[1][1],N[2][1],即:

同 理,求出N_02 N_12 N_22,然后:

上面的只是表示一个句子的计算,我们为了加快速度,或者使用GPU的 时候,需要用到batch,那么batch里的上述N T E是怎么个存在形式呢?以batch = n为例:N数据格式为:

T数据格式为:

E数据格式为:

其中,X^i_j中的i表示batch里的第i组矩阵,j表示batch里的第i组中位置为j的 数据。
6.预测过程
上面是Encoder编码过程,训练完了,该看看训练的效果了,这里预测的过 程叫做Decoder解码过程。这时候N E T都是固定了的,不会再变化。我们 的目的是,选取可能性最高的,又因为可能性最高在这里表示得分最高, 然后根据最高的得分,我们向前一个一个的选取每次前一个最高得分的节 点,最终这些所有的节点就是我们的最后的预测序列。这个过程是不是很 熟悉的感觉,对就是我们的动态规划算法,但是在这里叫维特比算法。我 们来走一遍过程:
每个节点选取得分最高的路径并记录得分和选的哪条路径:其中n^s_ij中的s表示前一条路径,没有的就是−1,nij表示前节点到当前节点的最佳得 分。此时
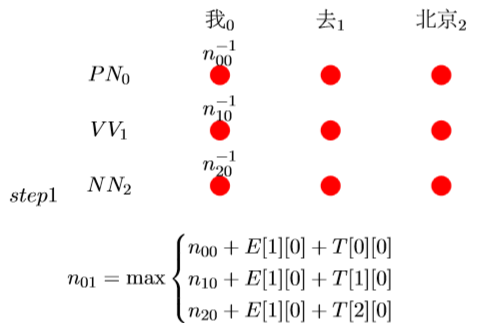
比如此时预测n_20 + E[1][0] + T[2][0]为最高的,则记录n_01 = n_20 + E[1][0] + T[2][0]且路径为2,综上记为n^2_01:
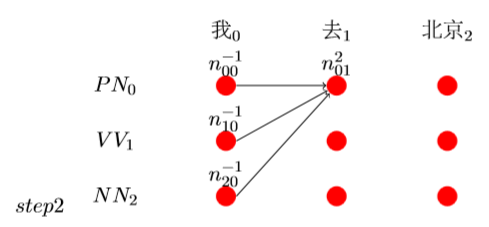
同理,我们假设有了step3的最终结果。
在最后我们假如n_22最大,而且它的前一个路径为1,则看到n_11的前一 个路径为0,而且n_00的前一个路径为−1,表示结束,则整个路径就有了, 即为n_00− > n_11− > n_22,如图step4:
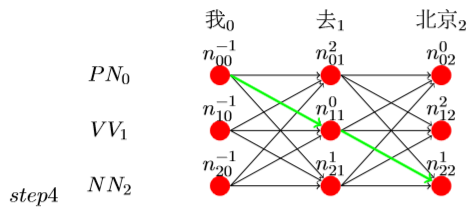
由step4得,最终(’我’,’去’,’北京’)的预测结果为:
(’我’− > PN,’去’− > V V ,’北京’− > NN)。
The End