本文对牛津大学、DeepMind 等单位合作完成的论文《Learning Object Bounding Boxes for 3D Instance Segmentation on Point Clouds》进行解读,该论文发表在NeurIPS 2019上,目前代码已公开。
链接: arxiv.org/abs/1906.0114
论文第一作者为牛津大学博士生杨波,本文作者为这项工作的作者之一 Qingyong Hu。
该论文提出了一种新型的 3D 点云实例分割的框架——3D-BoNet。这是一种基于边界框回归的高效点云实例分割算法,通过最小化匹配代价函数来实现大致的边界框回归,并通过point mask预测来实现最终的实例分割。3D-BoNet 在 ScanNet 和 S3DIS 数据集上都达到了SOTA的效果,且更加高效。
先上图:

实现有效的三维场景理解(3D scene understanding)是计算机视觉和人工智能领域的关键问题之一。近年来,针对三维点云理解的研究取得了显著的进展,在诸如点云目标检测,语义分割等任务上都展现出了很不错的效果。然而,针对于点云实例分割的研究还处于较为初级的阶段。
当前主流的点云实例分割算法可以分为以下两类,如下图所示:
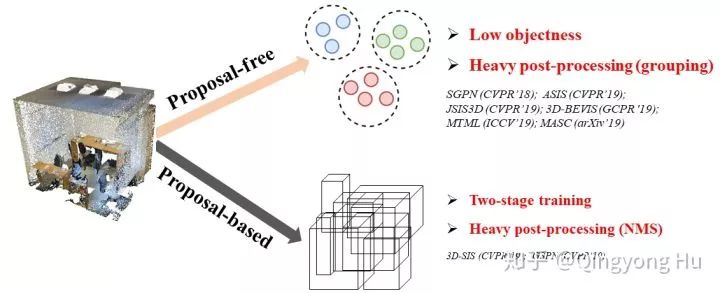
图1. 当前主流的点云实例分割算法对比
1)基于候选目标框(Proposal-based methods)的算法,例如3D-SIS[1],GSPN[2],这类方法通常依赖于两阶段的训练(two-stage training)和昂贵的非极大值抑制(non-maximum suppression, NMS)等操作来对密集的proposal进行选择。
2)无候选目标框的算法(Proposal-free methods),例如SGPN[3], ASIS[4], JSIS3D[5], MASC[6], 3D-BEVIS[7]等。这类算法的核心思想是为每个点学习一个discriminative feature embedding,然后再通过诸如mean-shift等聚类(clustering)方法来将同一个instance的点聚集(group)到一起。这类方法的问题在于最终聚类到一起的instance目标性(objectness)比较差。此外,此类方法后处理步骤(post-processing)的时间成本通常较高。
不同于上述两类方法,我们提出了一个single stage, anchor free并且end-to-end的基于边界框回归的实例分割算法(3D-BoNet)。该算法具有如下优势:
- 相比于proposal-free的方法,3D-BoNet显式地去预测目标的边界框,因此最终学到的instance具有更好的目标性(high objectness).
- 相比于proposal-based的方法,3D-BoNet并不需要复杂耗时的region proposal network以及ROIAlign等操作,因此也不需要NMS等post-processing步骤。
- 3D-BoNet由非常高效的shared MLP组成,并且不需要诸如非极大值抑制,特征采样(feature sampling),聚类(clustering)或者投票(voting)等后处理步骤,因此非常高效。
Reference
[1] J. Hou, A. Dai, and M. Nießner. 3D-SIS: 3D Semantic Instance Segmentation of RGB-D Scans. CVPR, 2019
[2] L. Yi, W. Zhao, H. Wang, M. Sung, and L. Guibas. GSPN: Generative Shape Proposal Network for 3D Instance Segmentation in Point Cloud. CVPR, 2019.
[3] W. Wang, R. Yu, Q. Huang, and U. Neumann. SGPN: Similarity Group Proposal Network for 3D Point Cloud Instance Segmentation. CVPR, 2018.
[4] X. Wang, S. Liu, X. Shen, C. Shen, and J. Jia. Associatively Segmenting Instances and Semantics in Point Clouds. CVPR, 2019.
[5] Q.-H. Pham, D. T. Nguyen, B.-S. Hua, G. Roig, and S.-K. Yeung. JSIS3D: Joint Semantic-Instance Segmentation of 3D Point Clouds with Multi-Task Pointwise Networks and Multi-Value Conditional Random Fields. CVPR, 2019.
[6] C. Liu and Y. Furukawa. MASC: Multi-scale Affinity with Sparse Convolution for 3D Instance Segmentation. arXiv, 2019.
[7] C. Elich, F. Engelmann, J. Schult, T. Kontogianni, and B. Leibe. 3D-BEVIS: Birds-Eye-View Instance Segmentation. GCPR, 2019.
[8] H. W. Kuhn. The Hungarian Method for the assignment problem. Naval Research Logistics Quarterly, 2(1-2):83–97, 1955.
[9] H. W. Kuhn. Variants of the hungarian method for assignment problems.Naval Research LogisticsQuarterly, 3(4):253–258, 1956
[10] T.-Y. Lin, P. Goyal, R. Girshick, K. He, and P. Dollar. Focal Loss for Dense Object Detection. ICCV, 2017.