矩阵的特征值(eigenvalue)和特征向量(eigenvector)在很多应用中都具有重要的数学和物理意义。Householder 矩阵和变换提供了一种有效的方式,通过反射变换将一个向量映射到一个标准的方向,这对于一些数值计算问题具有重要的意义。
本文将详细介绍Householder方法的基本原理和步骤,并给出其Python实现。
一、Jacobi 旋转法
Jacobi 旋转法的每一次迭代中,需要选择一个非对角元素最大的位置,然后构造相应的旋转矩阵,进行相似变换,使得矩阵逐渐对角化。
二、Jacobi 过关法
Jacobi 过关法(Jacobi’s threshold method)是 Jacobi 旋转法的一种改进版本,其主要目的是减少计算工作和提高运行速度。该方法通过动态调整阈值,并根据阈值对非对角元素进行选择性的旋转变换,以逐步对角化对称矩阵。
三、Householder 方法
如果对任意向量
,我们可以将其分解为与
平行的分量
和与
正交的分量
,即
,那么 Householder 变换会将
变换为
。这个变换可以理解为镜面反射,它不改变向量在与
正交的平面上的投影,但将向量沿着
的方向反射。数学表达式为:
这个性质使得 Householder 变换在一些数值计算的应用中非常有用,例如 QR 分解等。
1. 旋转变换
在 Householder 方法中,通过一系列的正交相似变换,可以将实对称矩阵 (A) 转化为三对角矩阵。不同于 Jacobi 旋转法(
),Householder 方法的旋转矩阵选择的角度使得
。
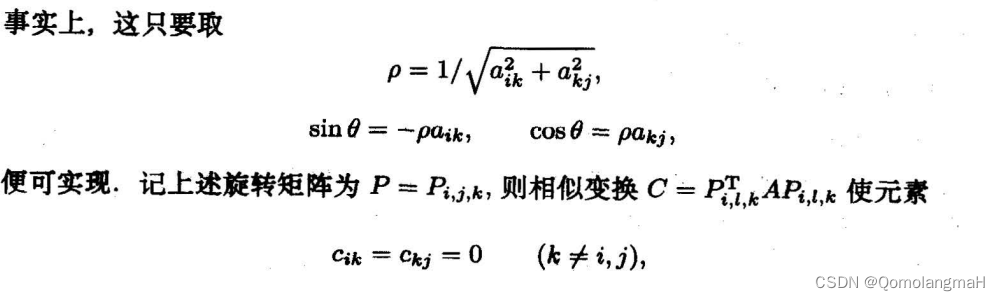
a. 旋转变换的选择
对于实对称矩阵
中的元素
,选择适当的旋转角度
,可以使得
变为零。具体而言,选择
使得:
通过这样的选择,我们可以构造一个旋转矩阵
,该矩阵对应的正交相似变换可以将
变为零。这一过程实现了对实对称矩阵的正交相似变换,使得某些元素变为零,逐步实现了将矩阵转化为三对角形式。
b. 旋转变换的顺序
在进行 Householder 变换时,旋转的顺序很重要。通常,可以选择按列进行变换。例如,对于
,可以依次选择
,然后对每一对
进行正交相似变换,将
变为零。整个过程的迭代将会逐步将实对称矩阵
转化为三对角矩阵
。
2. Householder矩阵(Householder Matrix)
a. H矩阵的定义
设
为单位向量,即
。定义 Householder 矩阵
,其中
为单位矩阵。这个矩阵具有以下性质:
- 对称性:
,即 Householder 矩阵是对称的。
- 正交性:
,即 Householder 矩阵是正交矩阵。
- 保范性: 对于任意非零向量
和
,如果
,则存在 Householder 矩阵
,使得
。
- 考虑 Householder 矩阵对向量
的作用:
。这说明 Householder 矩阵将向量
反射到其负向量上。
- 对于任何与
正交的向量
,有
,即 Householder 矩阵保持与
正交的向量不变。
- 因此对任意向量
,设
,那么 Householder 变换会将
变换为
,数学表达式为:
b. H变换的几何解释
可以将 Householder 变换视为镜面反射。考虑
为反射面上的单位法向量。对于任意
,Householder 变换将
的投影反射到
方向,同时保持投影在反射面上。
c. H变换的应用场景
- 矩阵三对角化: 在计算线性代数中,Householder 变换常用于将矩阵化为三对角形式,以便更容易进行特征值计算等操作。
- QR 分解: Householder 变换是计算 QR 分解的基本工具,用于将矩阵分解为一个正交矩阵和一个上三角矩阵的乘积。
3. H变换过程详解
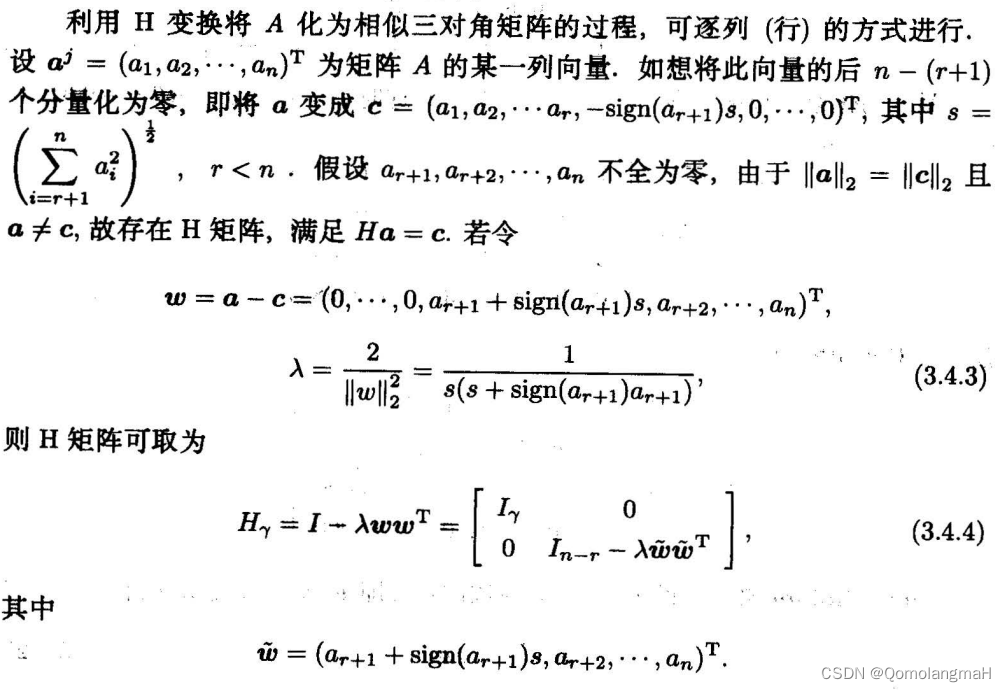
a. 过程介绍
对于矩阵
的某一列向量
,如果我们想将向量的后
个分量化为零,即将
变为
,其中
(从
计算到
)且
,则可以引入 Householder 矩阵
,使得
。Householder 矩阵的计算方式如下:
其中,
是单位向量
,具体位置在第
个。
b. 细节解析
- Householder 矩阵的构造:
- 通过 Householder 变换,构造 Householder 矩阵
H ,将某一列
a_j 的
r+1 到
n 个分量化为零。
- 计算过程的稳定性:
- 将
a 的
r+1 到
n 个分量的符号设定为
-\text{sign}(a_{r+1}) ,以增强计算的稳定性。
- 计算相似三对角矩阵:
- 将
A 逐列进行正交相似变换,得到
A_1, A_2, \ldots, A_{n-1} 。
- 最终得到相似三对角矩阵
G = A_n = H_{n-2} \cdot \ldots \cdot H_2 \cdot H_1 \cdot A 。
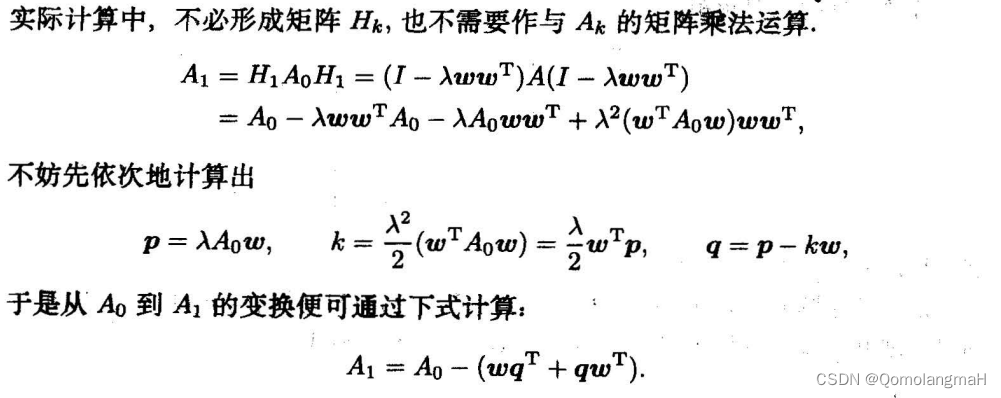
- 实际计算中的优化:
- 实际计算中,无需形成所有的 Householder 矩阵,也无需进行矩阵乘法运算,可以直接在原矩阵上进行计算。
4. H变换例题解析
给定矩阵:
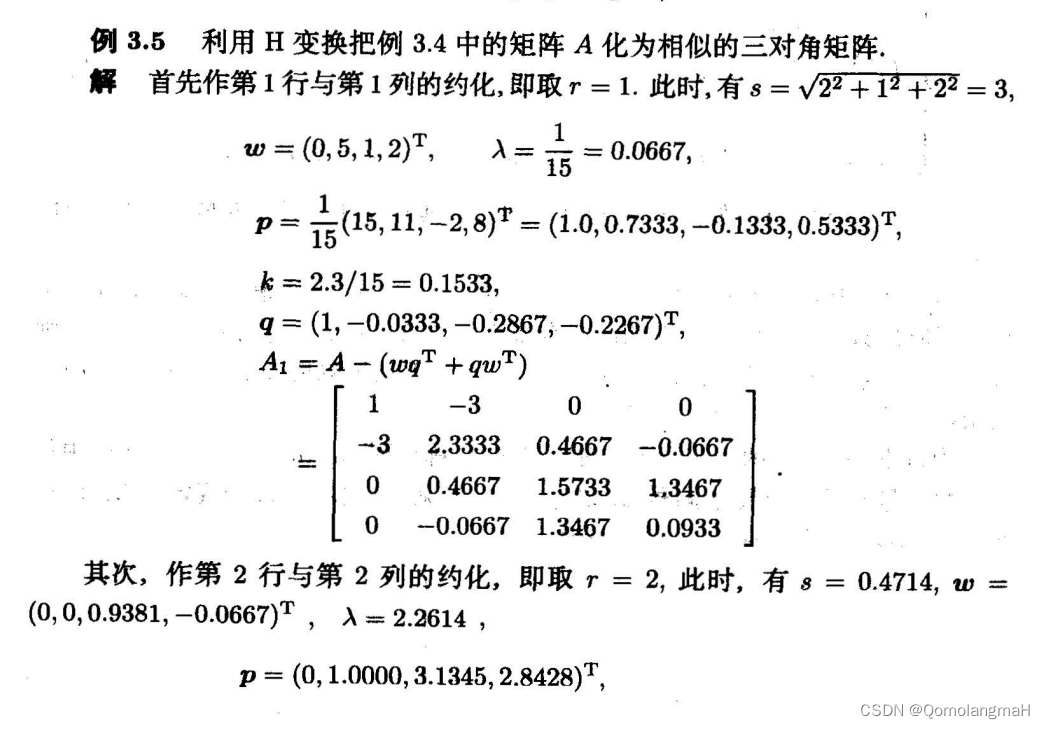

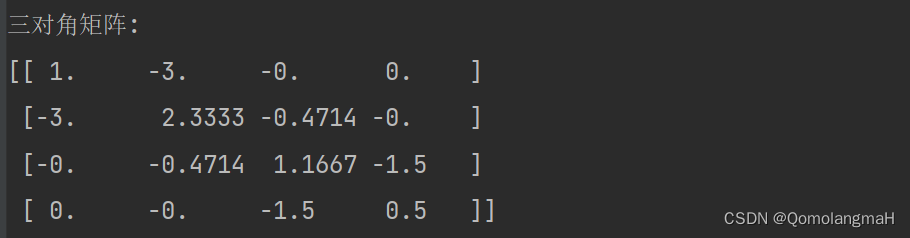
最终的三对角矩阵
:
的形式为
这样,通过选择
和
进行两次 Householder 变换,矩阵
被成功地化为三对角形式
。
四、Python实现
import numpy as npdef householder_matrix(v):
"""
给定向量 v,返回 Householder 变换矩阵 H
"""
v = np.array(v, dtype=float)
if np.linalg.norm(v) == 0:
raise ValueError("无效的输入向量,它应该是非零的。")v = v / np.linalg.norm(v) H = np.eye(len(v)) - 2 * np.outer(v, v) return Hdef householder_reduction(A):
"""
对矩阵 A 执行 Householder 变换,将其化为三对角形式。
"""
m, n = A.shape
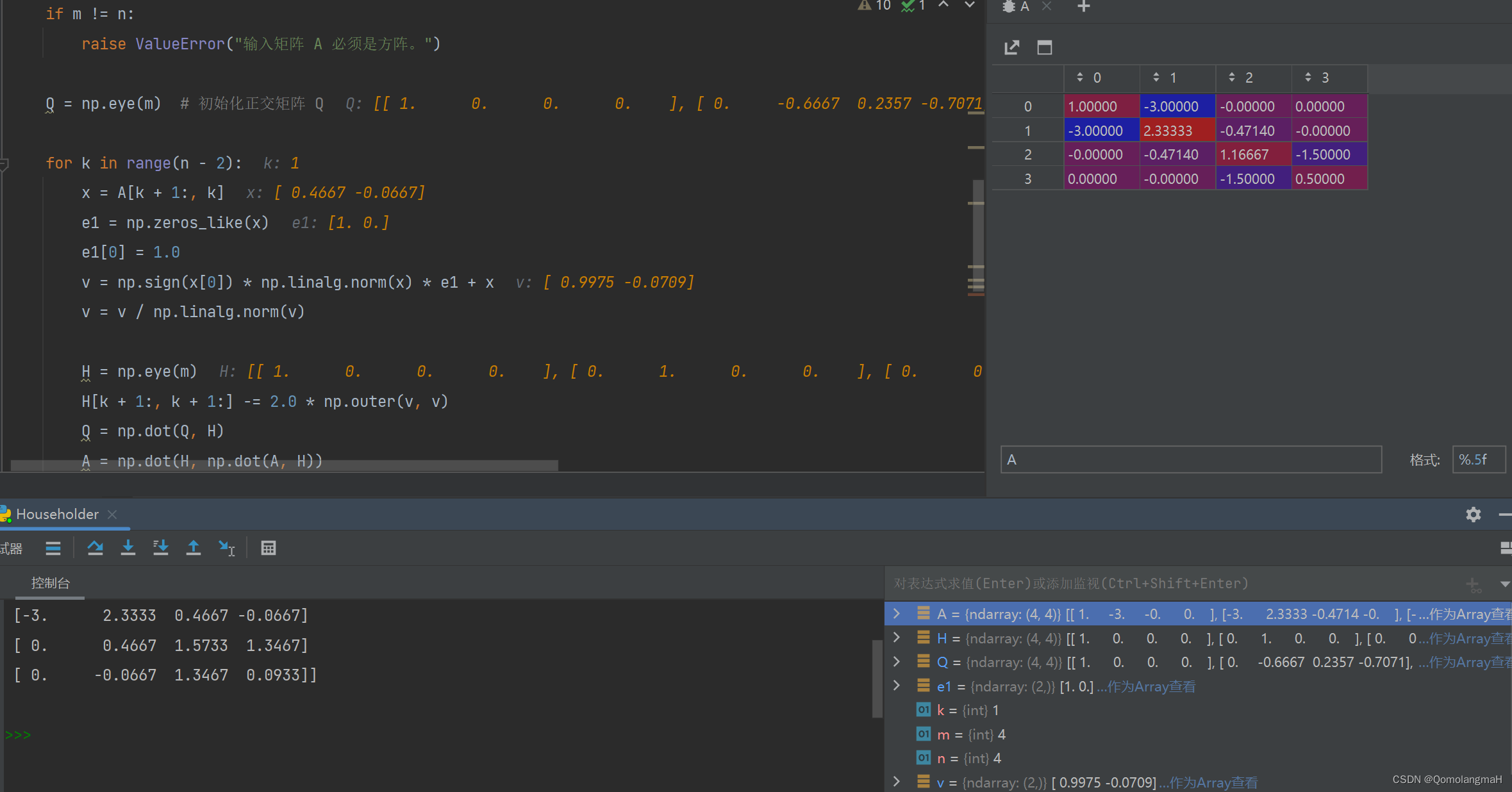
if m != n:
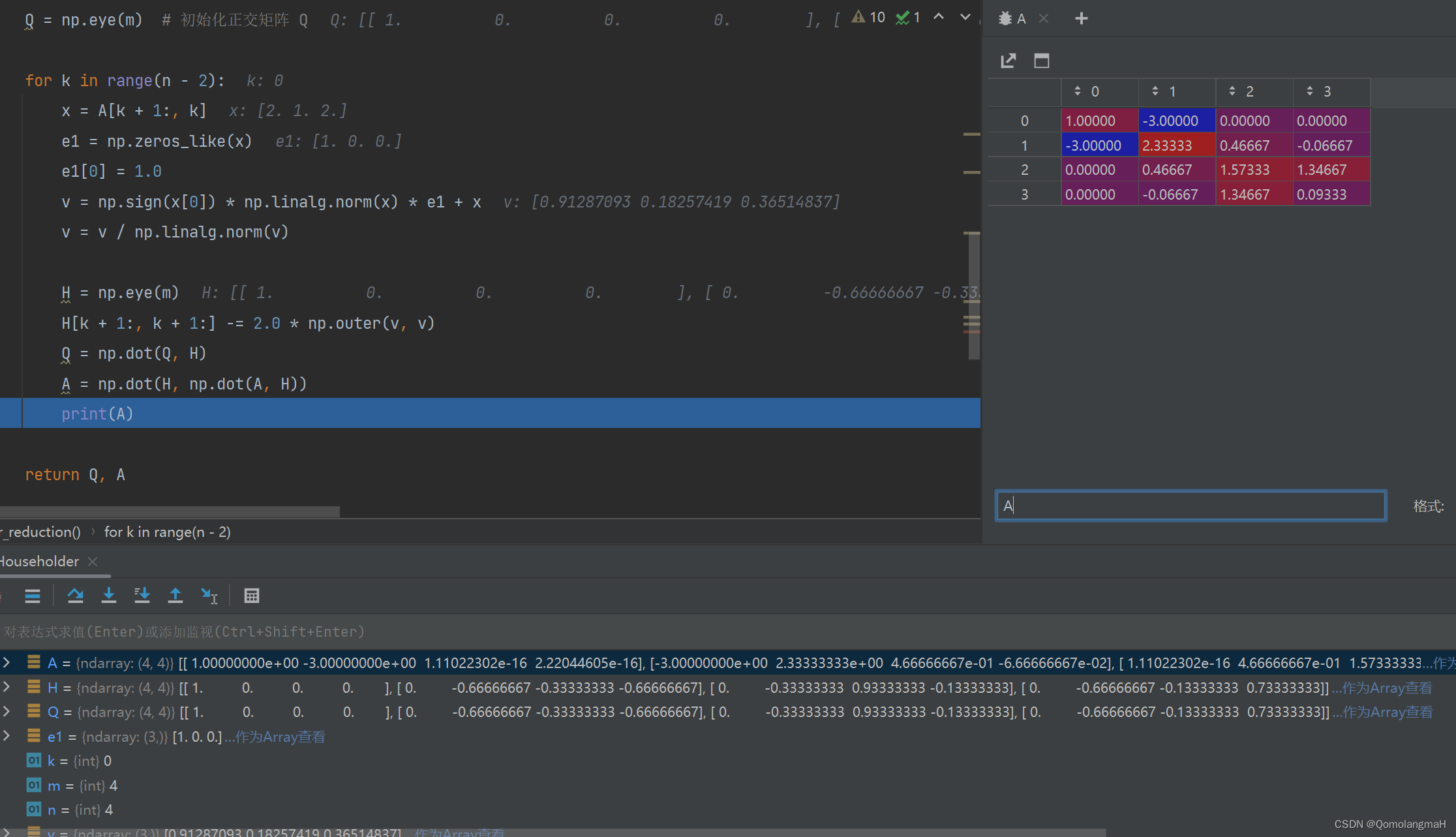
raise ValueError("输入矩阵 A 必须是方阵。")Q = np.eye(m) # 初始化正交矩阵 Q for k in range(n - 2): x = A[k + 1:, k] e1 = np.zeros_like(x) e1[0] = 1.0 v = np.sign(x[0]) * np.linalg.norm(x) * e1 + x v = v / np.linalg.norm(v) H = np.eye(m) H[k + 1:, k + 1:] -= 2.0 * np.outer(v, v) Q = np.dot(Q, H) A = np.dot(H, np.dot(A, H)) return Q, A示例矩阵
A = np.array([[1, 2, 1, 2],
[2, 2, -1, 1],
[1, -1, 1, 1],
[2, 1, 1, 1]], dtype=float)Householder 变换
Q, tridiagonal_A = householder_reduction(A)
np.set_printoptions(precision=4, suppress=True)
print("正交矩阵 Q:")
print(Q)
print("\n三对角矩阵:")
print(tridiagonal_A)
调试过程
- 第一次:
- 第二次:
- final:
