二进制版的vtk第三方库不支持Qt,需要重新下载vtk并用cmake编译,注意要版本对应,这里我用pcl1.8.1,对应vtk8.0,在这里下载。
编译VTK-8.0
可以参考这篇。
将下载好的vtk source解压到pcl安装目录下的3rdparty,将原来的VTK备份一下,然后再源文件下创建build文件夹,编译后的文件会放在这里:
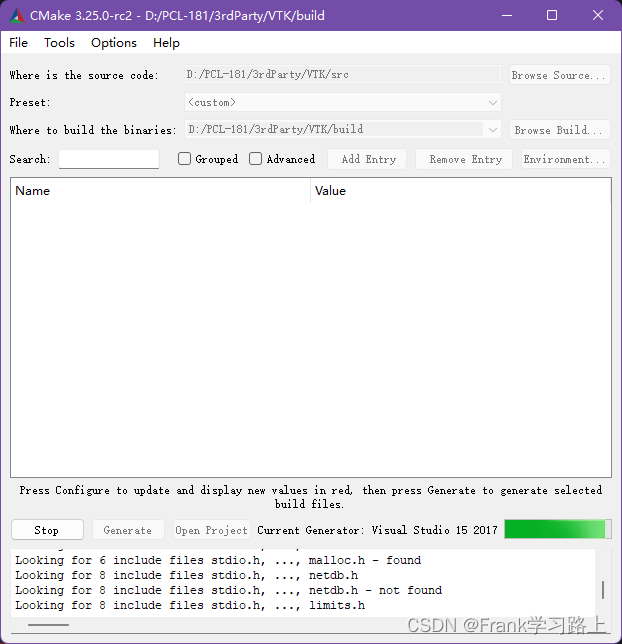
将其他文件放入src中,然后打开cmake,根据自己的配置来,点击Configure:
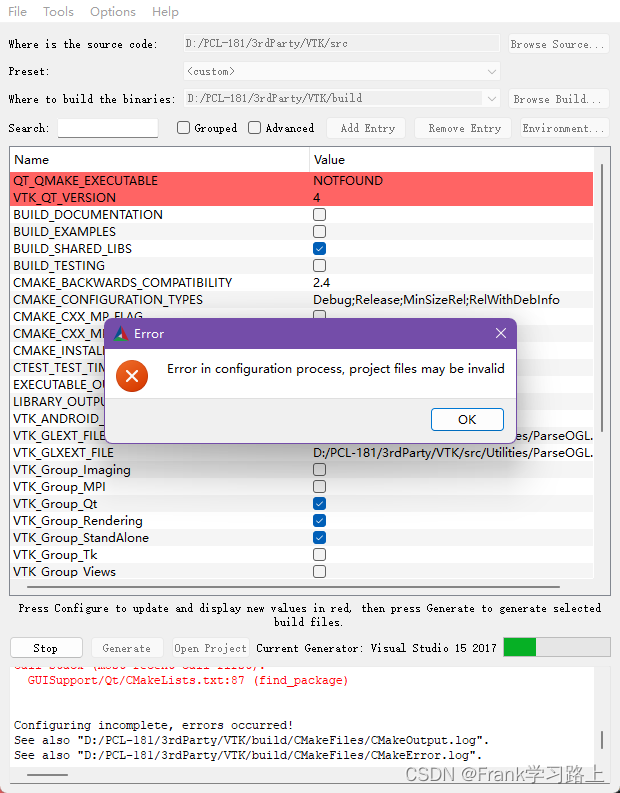
勾选这几项:
会这样报错,属于正常:
配置这两项后再点击Configure:
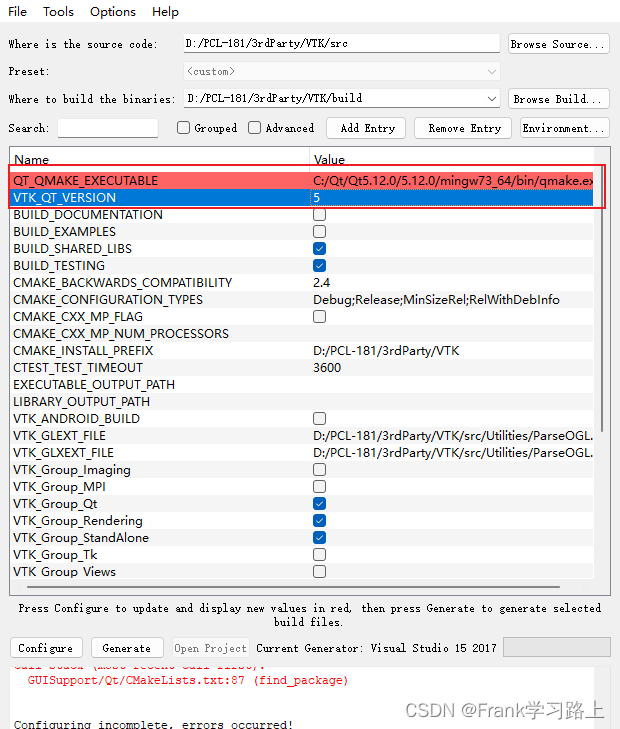
有一点要特别注意,这个Qt5_DIR一定要设置正确,否则一直出错(经验):
然后点击“Generate”生成VS项目文件。
(×备选项)
在build目录下打开终端,在VS2017编译器下,输入cmake .. -G "Visual Studio 15 2017" -A x64,会编译生成:
进入到build目录下,使用VS打开VTK.sln
首先在Debug x64下,右键ALL_BUILD生成编译,再右键INSTALL生成; 然后在Release x64下,右键ALL_BUILD生成编译,再右键INSTALL生成;(全编译生成的时间有点长,可以只生成那个QVTK模块)
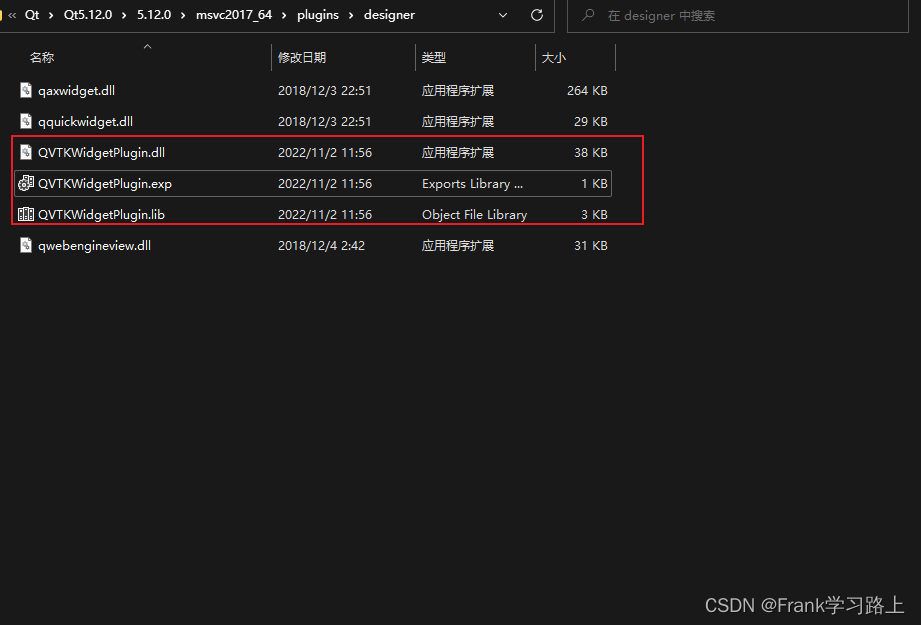
将3rdParty\VTK\plugins\designer下的QVTKWidgetPlugin.dll拷贝到QT\5.12\msvc2017_64\plugins\designer下,这样Qt里面就有了QVtk的控件了。
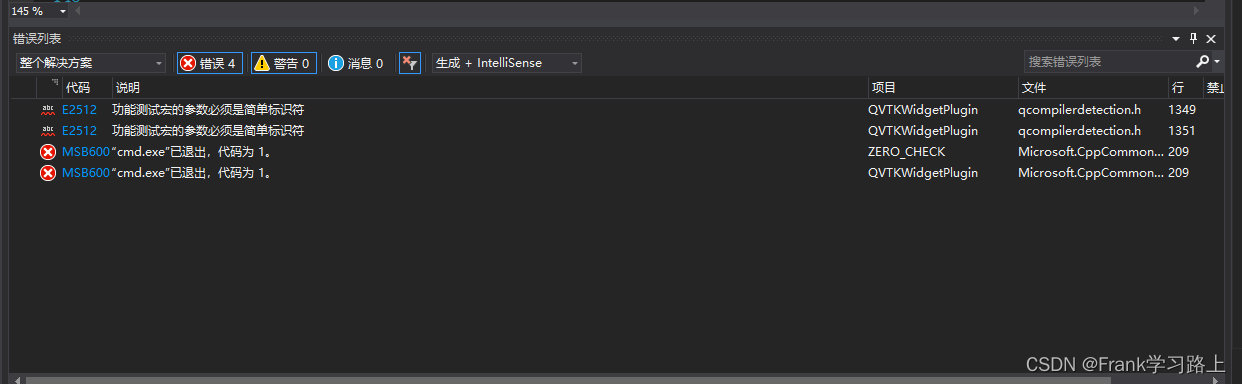
(bug) 后来我在编译的时候一直生成不了QVTKWidgetPlugin.dll,老是报错,因为我用的Qt编译器是mingw64,不知道是不是这个的原因。(2022.11.2更新,最好用msvc编译器,不要用mingw,用msvc成功了)
至此PCL在windows下的环境已经搭配好了,可以选择重启让环境变量生效。
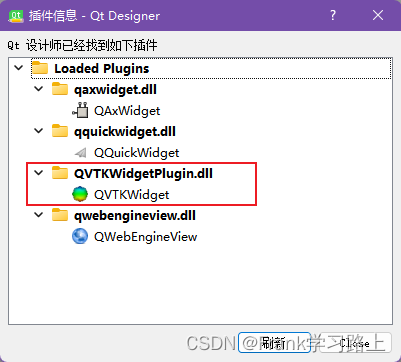
最后打开qt设计师,应该是可以看到QVTK这个插件的。
Qt测试demo
新建ui文件,将QVTK拖入窗体中,然后创建pclvisualizer.cpp和.h文件:
pclvisualizer.h
#ifndef PCLVISUALIZER_H //防卫式声明 #define PCLVISUALIZER_H#include <vtkAutoInit.h> //导入vtk必须导入,否则出错
VTK_MODULE_INIT(vtkRenderingOpenGL2);
VTK_MODULE_INIT(vtkInteractionStyle);#include <QtWidgets/QMainWindow>
#include <pcl/io/pcd_io.h> //输入输出
#include <pcl/point_types.h> //点云类型
#include <pcl/visualization/pcl_visualizer.h> //可视化
#include "ui_pclvisualizer.h"class PCLVisualizer : public QMainWindow
{
Q_OBJECT
public:
PCLVisualizer(QWidget *parent = 0); //实例化
~PCLVisualizer();private:
Ui::PCLVisualizerClass ui;
//点云数据存储
pcl::PointCloud<pcl::PointXYZ>::Ptr cloud; //实例化cloud
boost::shared_ptr<pcl::visualization::PCLVisualizer> viewer; //viewer//初始化vtk部件 void initialVtkWidget();private slots:
//创建打开槽
void onOpen();
void exit();
//void setcolor();
};
#endif // PCLVISUALIZER_H
pclvisualizer.cpp
#include <QFileDialog>
#include <iostream>
#include <vtkRenderWindow.h> //vtk渲染
#include "pclvisualizer.h"
#include <QColorDialog>
#pragma execution_character_set("utf-8") //编码PCLVisualizer::PCLVisualizer(QWidget *parent)
: QMainWindow(parent)
{
ui.setupUi(this);
//初始化
initialVtkWidget();
//连接信号和槽
connect(ui.actionOpen, &QAction::triggered, this, &PCLVisualizer::onOpen);
connect(ui.actionExit, &QAction::triggered, this, &PCLVisualizer::exit);
}PCLVisualizer::~PCLVisualizer()
{}
void PCLVisualizer::initialVtkWidget()
{
cloud.reset(new pcl::PointCloud<pcl::PointXYZ>); //reset cloud
viewer.reset(new pcl::visualization::PCLVisualizer("viewer", false)); //reset viewer
viewer->addPointCloud(cloud, "cloud"); //添加点云ui.qvtkWidget->SetRenderWindow(viewer->getRenderWindow()); //设置渲染 viewer->setupInteractor(ui.qvtkWidget->GetInteractor(), ui.qvtkWidget->GetRenderWindow()); //设置交互 ui.qvtkWidget->update(); //update}
//读取点云数据
void PCLVisualizer::onOpen()
{
//打开PCD文件
QString fileName = QFileDialog::getOpenFileName(this,
tr("Open PointCloud"), ".",
tr("Open PCD files(*.pcd)"));//判断是否存在 if (!fileName.isEmpty()) { std::string file_name = fileName.toStdString(); //sensor_msgs::PointCloud2 cloud2; pcl::PCLPointCloud2 cloud2; //pcl::PointCloud<Eigen::MatrixXf> cloud2; Eigen::Vector4f origin; Eigen::Quaternionf orientation; //四元数 int pcd_version; int data_type; unsigned int data_idx; int offset = 0; pcl::PCDReader rd; //实例化rd读取对象 rd.readHeader(file_name, cloud2, origin, orientation, pcd_version, data_type, data_idx); //判断数据类型 if (data_type == 0) { pcl::io::loadPCDFile(fileName.toStdString(), *cloud); } else if (data_type == 2) { pcl::PCDReader reader; reader.read<pcl::PointXYZ>(fileName.toStdString(), *cloud); } viewer->updatePointCloud(cloud, "cloud"); viewer->resetCamera(); ui.qvtkWidget->update(); }}
void PCLVisualizer::exit() //exit
{
this->close();
}
实际上,只是把上面的代码拷贝进来就直接运行不了的,会报各种各样的错误,归根结底是PCL和VTK库编译的问题,比如编译时选择的OpenGL还是OpenGL2,有没有把VTK库的Debug和Release版本都编译一遍,VS+Qt的编译环境是Debug x64还是Release x64,所以,一直要每一步都正确,最终主要是核对这两个属性表的配置是否正确。

配置好环境后,建议先创建一个空的Qt环境,加入QVTK控件试一下是否能正常生成,如下:

我在复现的时候,还是遇到了问题,点云pcd打不开,主要是这一步的问题:
复现代码如下:
pcl_test.h#pragma once#include <QtWidgets/QMainWindow>
#include <QFileDialog>
#include <QColorDialog>
#include <iostream>#include <pcl/io/pcd_io.h> //输入输出
#include <pcl/point_types.h> //点云类型
#include <pcl/visualization/pcl_visualizer.h> //可视化#include <vtkRenderWindow.h> //vtk渲染
#include <vtkRenderer.h>
#include <vtkInteractorStyleTrackballCamera.h>
#include <vtkGenericOpenGLRenderWindow.h>
#include <vtkRenderWindowInteractor.h>
#include "ui_pcl_test.h"#include <vtkAutoInit.h> //导入vtk必须导入,否则出错
VTK_MODULE_INIT(vtkRenderingOpenGL2);
VTK_MODULE_INIT(vtkInteractionStyle);
VTK_MODULE_INIT(vtkRenderingFreeType);class pcl_test : public QMainWindow
{
Q_OBJECTpublic:
pcl_test(QWidget *parent = Q_NULLPTR);
~pcl_test();private:
Ui::pcl_testClass ui;//点云数据存储 pcl::PointCloud<pcl::PointXYZ>::Ptr cloud; //实例化cloud boost::shared_ptr<pcl::visualization::PCLVisualizer> viewer; //viewer //pcl::visualization::PCLVisualizer::Ptr viewer; //初始化vtk部件 void initialVtkWidget();
private slots:
//创建打开槽
void onOpen();
void onExit();
//void setcolor();
};
pcl_test.cpp#include "pcl_test.h"
#pragma execution_character_set("utf-8") //编码/*
问题:addPointCloud添加点云时出错!
*/pcl_test::pcl_test(QWidget *parent)
: QMainWindow(parent)
{
ui.setupUi(this);//初始化 //initialVtkWidget(); //连接信号和槽 connect(ui.actionOpen, &QAction::triggered, this, &pcl_test::onOpen); connect(ui.actionExit, &QAction::triggered, this, &pcl_test::onExit);}
pcl_test::~pcl_test()
{}
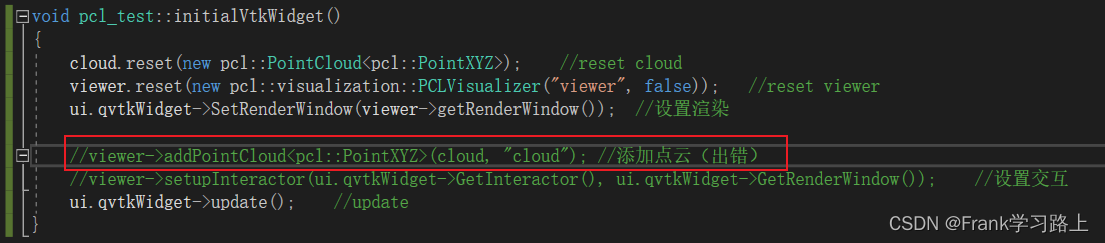
void pcl_test::initialVtkWidget()
{
cloud.reset(new pcl::PointCloud<pcl::PointXYZ>); //reset cloud
viewer.reset(new pcl::visualization::PCLVisualizer("viewer", false)); //reset viewer
ui.qvtkWidget->SetRenderWindow(viewer->getRenderWindow()); //设置渲染//viewer->addPointCloud<pcl::PointXYZ>(cloud, "cloud"); //添加点云(出错) //viewer->setupInteractor(ui.qvtkWidget->GetInteractor(), ui.qvtkWidget->GetRenderWindow()); //设置交互 ui.qvtkWidget->update(); //update}
//读取点云数据
void pcl_test::onOpen()
{
//打开PCD文件
QString fileName = QFileDialog::getOpenFileName(this,
tr("Open PointCloud"), ".",
tr("Open PCD files(*.pcd)"));//判断是否存在 if (!fileName.isEmpty()) { std::string file_name = fileName.toStdString(); //sensor_msgs::PointCloud2 cloud2; pcl::PCLPointCloud2 cloud2; //pcl::PointCloud<Eigen::MatrixXf> cloud2; Eigen::Vector4f origin; Eigen::Quaternionf orientation; //四元数 int pcd_version; int data_type; unsigned int data_idx; int offset = 0; pcl::PCDReader rd; //实例化rd读取对象 rd.readHeader(file_name, cloud2, origin, orientation, pcd_version, data_type, data_idx); //判断数据类型 if (data_type == 0) { pcl::io::loadPCDFile(fileName.toStdString(), *cloud); } else if (data_type == 2) { pcl::PCDReader reader; reader.read<pcl::PointXYZ>(fileName.toStdString(), *cloud); } viewer->updatePointCloud(cloud, "cloud"); viewer->resetCamera(); ui.qvtkWidget->update(); }}
void pcl_test::onExit() //exit
{
this->close();
}
结果:

这两天使用下来,感觉VS+Qt+VTK太难用了,可能还是太菜吧,这个代码一直复现不出来,哪位大佬能解决的话欢迎留言。
以上。