矩阵的特征值(eigenvalue)和特征向量(eigenvector)在很多应用中都具有重要的数学和物理意义。Jacobi 旋转法是一种用于计算对称矩阵特征值和特征向量的迭代方法,Jacobi 过关法是 Jacobi 旋转法的一种改进版本,其主要目的是减少计算工作和提高运行速度。
本文将详细介绍Jacobi 过关法的基本原理和步骤,并给出其Python实现。
一、Jacobi 旋转法
Jacobi 旋转法的每一次迭代中,需要选择一个非对角元素最大的位置,然后构造相应的旋转矩阵,进行相似变换,使得矩阵逐渐对角化。
- 对称矩阵是一个实数矩阵,其转置与自身相等。
- 对于一个方阵
,如果存在标量
和非零向量
,使得
,那么
就是
的特征值,
就是对应于
的特征向量。
1. 基本思想
Jacobi 旋转法的基本思想是通过一系列的相似变换,逐步将对称矩阵对角化,使得非对角元素趋于零。这个过程中,特征值逐渐浮现在对角线上,而相应的特征向量也被逐步找到。下面是 Jacobi 旋转法的基本步骤:
- 选择旋转角度: 选择一个旋转角度 θ,通常使得旋转矩阵中的非对角元素为零,从而实现对角化,通常选择非对角元素中绝对值最大的那个作为旋转的目标。
- 构造旋转矩阵: 构造一个旋转矩阵 J,该矩阵为单位矩阵,只有对应于选择的非对角元素的位置上有两个非零元素,其余位置上为零。这两个非零元素的值由旋转角度 θ 决定,例如,对于 2x2 矩阵,旋转矩阵可以表示为:
- 相似变换: 计算相似变换矩阵
,即
,其中
是原始矩阵,
是旋转矩阵,计算过程如下:
通过矩阵相乘计算,我们可以得到
中的非对角元素,假设这两个元素分别位于矩阵的 (1,2) 和 (2,1) 的位置。令
为这两个元素,即
。
接下来,我们希望通过选择合适的
使得
变为零,从而达到对角化的目的,即
,进一步可推导出
- 若
,则使用
形式
- 迭代: 重复步骤 1-3,直到矩阵 A 的非对角元素都趋于零或满足一定的精度要求。
- 提取特征值和特征向量: 对角线上的元素即为矩阵 A 的特征值,而 P 中的列向量即为对应于这些特征值的特征向量。
2. 注意事项
Jacobi 旋转法的优点是可以用于任意大小的对称矩阵,但其缺点是迭代次数较多,计算量较大。在实际应用中,通常会结合其他方法来提高计算效率。
二、Jacobi 过关法
Jacobi 过关法(Jacobi’s threshold method)是 Jacobi 旋转法的一种改进版本,其主要目的是减少计算工作和提高运行速度。该方法通过动态调整阈值,并根据阈值对非对角元素进行选择性的旋转变换,以逐步对角化对称矩阵。
1. 基本思想
- 计算非对角元素平方和: 对于对称矩阵
,计算其非对角元素平方和,表示为
。然后取平方根,得到
。
- 设定初始阈值
: 预先设定一个初始阈值
。
- 扫描非对角元素: 对于
其中
,扫描矩阵的上三角或下三角部分。
- 进行选择性旋转变换: 对于绝对值大于当前阈值 \theta 的非对角元素 a i j a_{ij} aij,进行 Jacobi 旋转变换,将其旋转为零。旋转变换的具体步骤如下: 选择旋转角度 ϕ \phi ϕ,通常通过 tan ( 2 ϕ ) = 2 a i j a i i − a j j \tan(2\phi) = \frac{2a_{ij}}{a_{ii} - a_{jj}} tan(2ϕ)=aii−ajj2aij计算。构造旋转矩阵 J J J,其中除了 J i i J_{ii} Jii 和 J j j J_{jj} Jjj 外的元素都为零,而 J i j J_{ij} Jij 和 J j i J_{ji} Jji 元素由 cos ( ϕ ) \cos(\phi) cos(ϕ) 和 − sin ( ϕ ) -\sin(\phi) −sin(ϕ)决定。执行相似变换 A = J T A J A = J^T A J A=JTAJ。
- 调整阈值
: 当所有非对角元素的绝对值都小于当前阈值
时,缩小阈值,即
,其中
是一个缩小因子。
- 重复步骤 3-5: 重复上述步骤,直到满足某个收敛条件,例如
,其中
是一个很小的正数。
2. 注意事项
通过不断调整阈值并选择性地进行旋转变换,Jacobi 过关法逐渐减小非对角元素的绝对值,以达到更好的数值稳定性。这种方法的优点在于,通过智能地选择非对角元素进行变换,可以有效减少迭代次数,提高计算效率。
三、Python实现
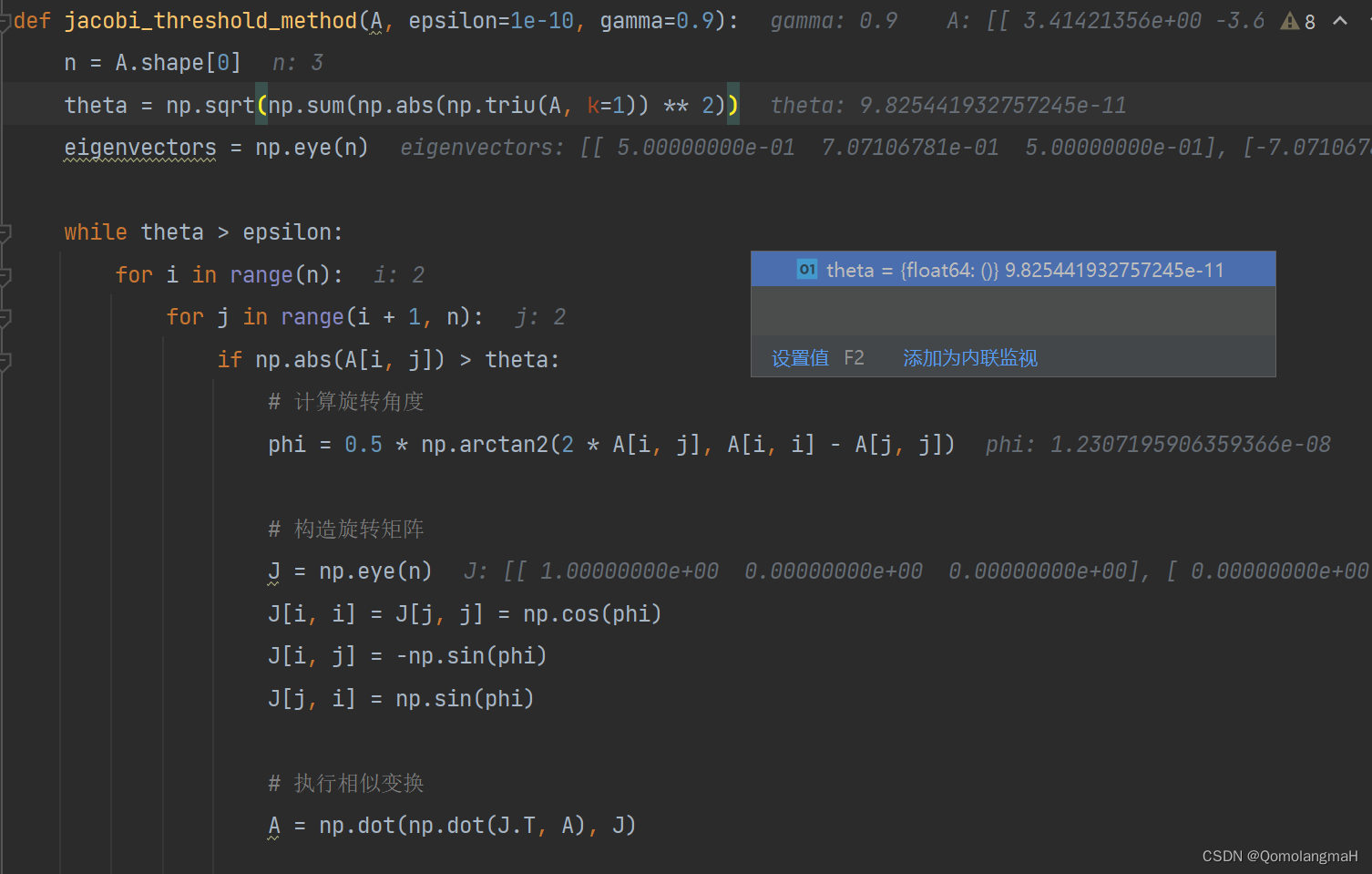
import numpy as npdef jacobi_threshold_method(A, epsilon=1e-10, gamma=0.9):
n = A.shape[0]
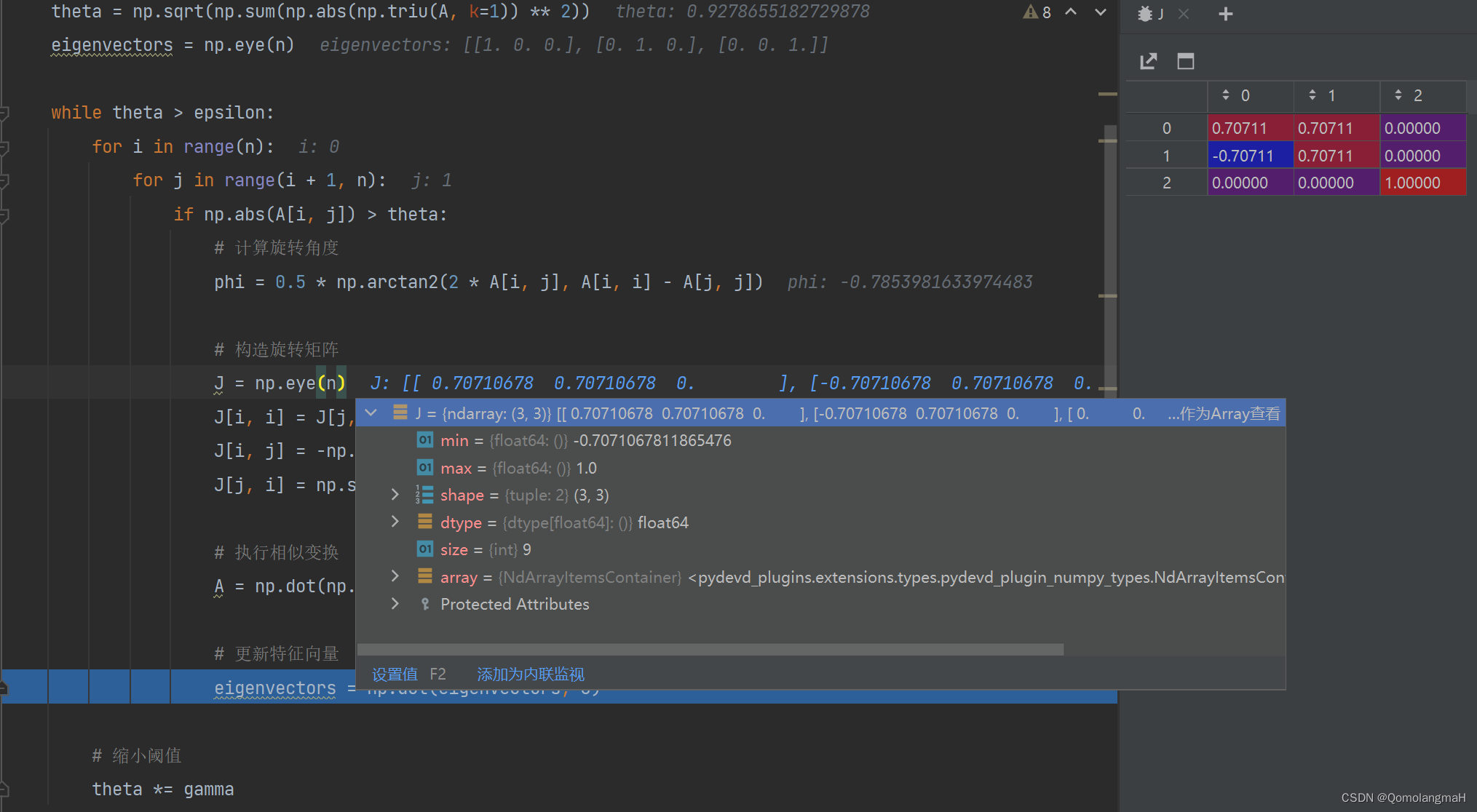
theta = np.sqrt(np.sum(np.abs(np.triu(A, k=1)) ** 2))
eigenvectors = np.eye(n)while theta > epsilon: for i in range(n): for j in range(i + 1, n): if np.abs(A[i, j]) > theta: # 计算旋转角度 phi = 0.5 * np.arctan2(2 * A[i, j], A[i, i] - A[j, j]) # 构造旋转矩阵 J = np.eye(n) J[i, i] = J[j, j] = np.cos(phi) J[i, j] = -np.sin(phi) J[j, i] = np.sin(phi) # 执行相似变换 A = np.dot(np.dot(J.T, A), J) # 更新特征向量 eigenvectors = np.dot(eigenvectors, J) # 缩小阈值 theta *= gamma # 提取特征值和特征向量 eigenvalues = np.diag(A) return eigenvalues, eigenvectors示例矩阵
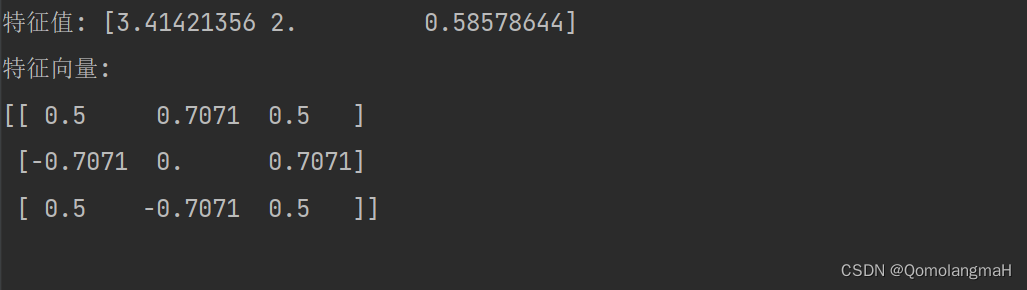
A = np.array([[2, -1, 0], [-1, 2, -1], [0, -1, 2]])
执行 Jacobi 过关法
eigenvalues, eigenvectors = jacobi_threshold_method(A)
print("特征值:", eigenvalues)
print("特征向量:")
np.set_printoptions(precision=4, suppress=True)
print(eigenvectors)
迭代过程(调试)
- 第一次:

………
- final: