论文地址: http://arxiv.org/pdf/1911.06994v3.pdf
代码: 公众号回复:08100576099
来源: 俄罗斯喀山英纳波利斯大学
论文名称:Regions of Interest Segmentation from LiDAR Point Cloud for Multirotor Aerial Vehicles
原文作者:Geesara Kulathunga
内容提要
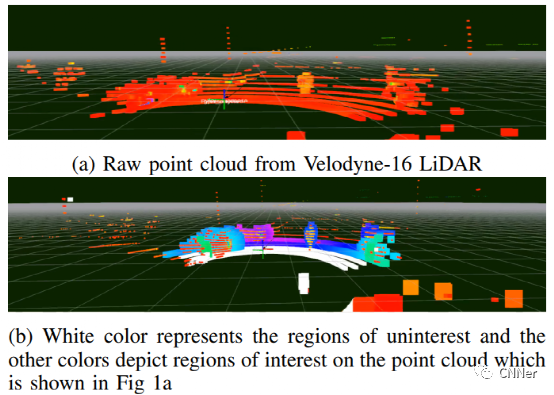
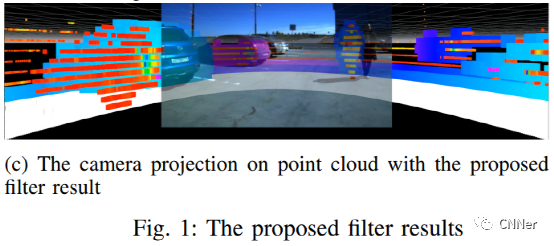
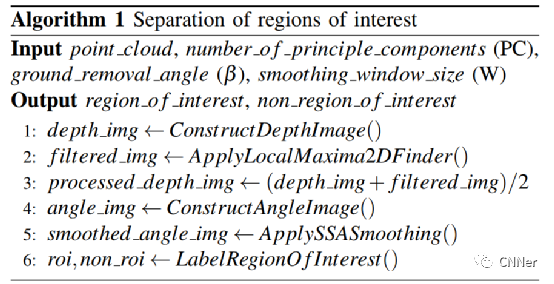
本文提出了一种用于多旋翼飞行器激光雷达3D点云感兴趣区域分割的新滤波器。它是专门针对实时应用的,在没有初步测绘的稀疏激光雷达点云上工作。我们将此滤波器作为农业无人机低空快速避障系统的重要组成部分。首先,将每个点云转化为深度图像,然后通过定位高像素密度区域来识别车辆附近的位置(局部最大值)。然后,将得到的像素点的局部最大值最大化后,将原始深度图像与识别的位置合并。下一步是基于改进的深度图像计算代表连续两束激光之间角度的距离角图像。一旦构造出相应的距离角图像,就进行平滑处理以减少噪声。最后,在融合平滑的距离角图像的同时,找出改进深度图像中的连通分量。这允许分离感兴趣的区域。该过滤器已经在各种模拟环境以及实际无人机上进行了测试,并提供了实时性能。
主要框架及实验结果

声明:文章来自于网络,仅用于学习分享,版权归原作者所有,侵权请联系删除。