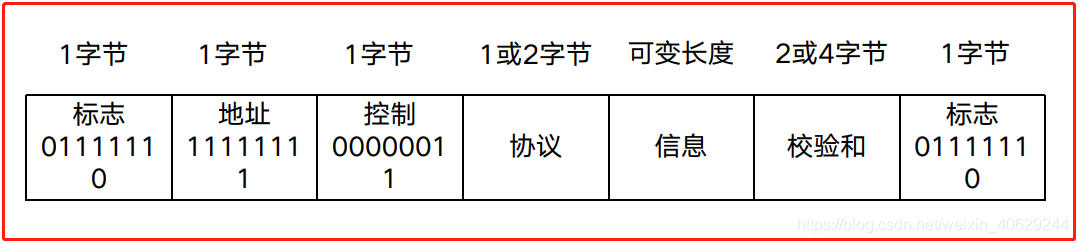
计算机网络之数据链路层与局域网 - 点对点链路协议
3. 网络控制协议(Network Control Protocol , NCP)
LOAM论文和程序代码的解读
文章:LOAM: Lidar Odometry and Mapping in Real-time
计算机网络之无线与移动网络-无线网络
蜂窝网络中的蜂窝塔(cell tower),IEEE 802.11无线局域网中的接入点(Access Point , AP)

ROS1云课→13三维可视化工具rviz
在左边有一个Displays面板,在面板的中间有一个包含了模拟环境下不同参数项的树形列表。在示例中,已经加载了部分参数项。实例中的配置和布局都存储在了config/***.rviz文件中,可以通过点击File | Open Config加载。

ROS1云课→13三维可视化工具rviz
在左边有一个Displays面板,在面板的中间有一个包含了模拟环境下不同参数项的树形列表。在示例中,已经加载了部分参数项。实例中的配置和布局都存储在了config/***.rviz文件中,可以通过点击File | Open Config加载。

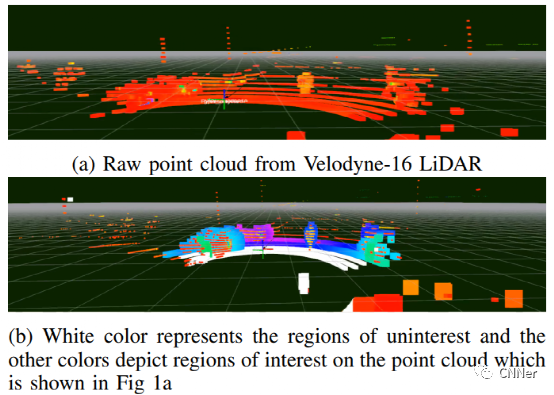
【点云分割】开源 | 用于多旋翼飞行器激光雷达3D点云感兴趣区域分割的新滤波器
论文地址: http://arxiv.org/pdf/1911.06994v3.pdf
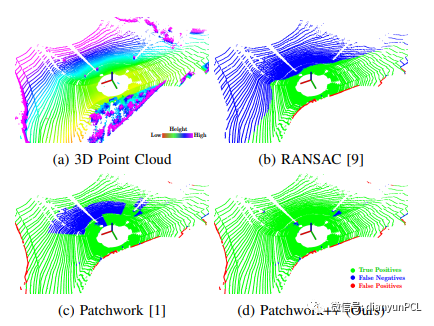
Patchwork++:基于点云的快速、稳健的地面分割方法
文章:Patchwork++: Fast and Robust Ground Segmentation Solving Partial Under-Segmentation Using 3D Point Cloud
该捋清!卷积、可分离卷积的参数和FLOPs计算!
不要着急,我们先假设:输入feature maps的通道数、输出的通道数、卷积核尺寸(长和宽一样时)分别为:
该捋清!卷积、可分离卷积的参数和FLOPs计算!
不要着急,我们先假设:输入feature maps的通道数、输出的通道数、卷积核尺寸(长和宽一样时)分别为:
CGAL 计算两个凸多边形相交的面积
我正在使用 CGAL 计算两个凸多边形相交的面积。在对 this 的接受答案中发布了执行此操作的简短演示代码。问题。但是,当我修改该代码以使用我感兴趣的多边形时,CGAL 从 CGAL::intersection() 例程的深处抛出运行时异常。
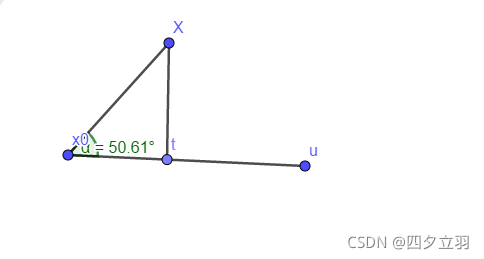
unity3d:向量计算,AOE图形相交
x0为起点,u为单位向量,则x0t的长度为 |x0x|cosa = x0xu / |u|,因为u为单位向量,模长为1。然后得到t点坐标为x - (x0 + Mathf.Abs(t) * u),因为x可能在x0的左边,所以只算长度的绝对值单位向量,然后算x,t两点距离
如何为计算机视觉任务选择正确的标注类型
机器学习中的注释(Annotation)是标记数据的过程,可以是文本,视频,图像或音频等形式。在计算机视觉任务中,图像注释有助于计算机更好的理解图像,计算机尝试在带注释的数据中学习出适用于新数据识别的相似的规则。

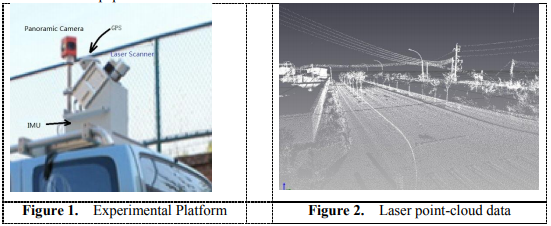
基于全景图像与激光点云配准的彩色点云生成算法(2014年文章)
标题:The algorithm to generate color point-cloud with the registration between panoramic imageand laser point-cloud
【点云分割】开源 | 港中文--提出一种新的稀疏激光雷达点云语义分割框架
论文地址: http://arxiv.org/pdf/2012.03762v1.pdf
ROS与PCL中点云数据之间的转换
应小伙伴们后台留言,想要了解ROS中如何使用PCL,本篇文章就将具体介绍一下。文章中如有错误,欢迎留言指出。也期待大家能够积极分享和讨论。
ROS与PCL中点云数据之间的转换
应小伙伴们后台留言,想要了解ROS中如何使用PCL,本篇文章就将具体介绍一下。文章中如有错误,欢迎留言指出。也期待大家能够积极分享和讨论。
解析几何:计算两条线段的交点
我们要实现 getLineSegIntersection 方法:提供两条线段,计算它们的交点。
开工!wrfout 计算台风准地转omega方程右侧项
在本项目中,我们将使用MetPy库来计算准地转Omega方程中涡度平流项和温度平流的拉普拉斯算子。根据Bluesetein(1992;Eq.5.6.11)提出的QG-Omega方程,我们将关注方程右侧的两个主要强迫项
计算机网络笔记(7)
发送窗口大于1,接收窗口等于1。出错时重传帧数多,适用于信道质量好,出错率少的情况。
【程序填空】点距离计算(单继承)
完成一维点类Point、二维平面点类Point_2D、三维空间点类Point_3D的类定义的程序填空。