喜报!腾讯云原生 Serverless SCF on K8s 获信通院技术创新领航者奖
数字时代,云计算正在以中枢神经的角色成为企业数字化转型的胎生力量,而云原生技术作为云计算中枢神经整体实现的关键技术内核正在对数字经济基础设施底座的粘性、韧性、弹性发挥决定作用,利用云原生技术、架构、理念构建数字化新底座正在成为各行各业数字化转型的实践重点。

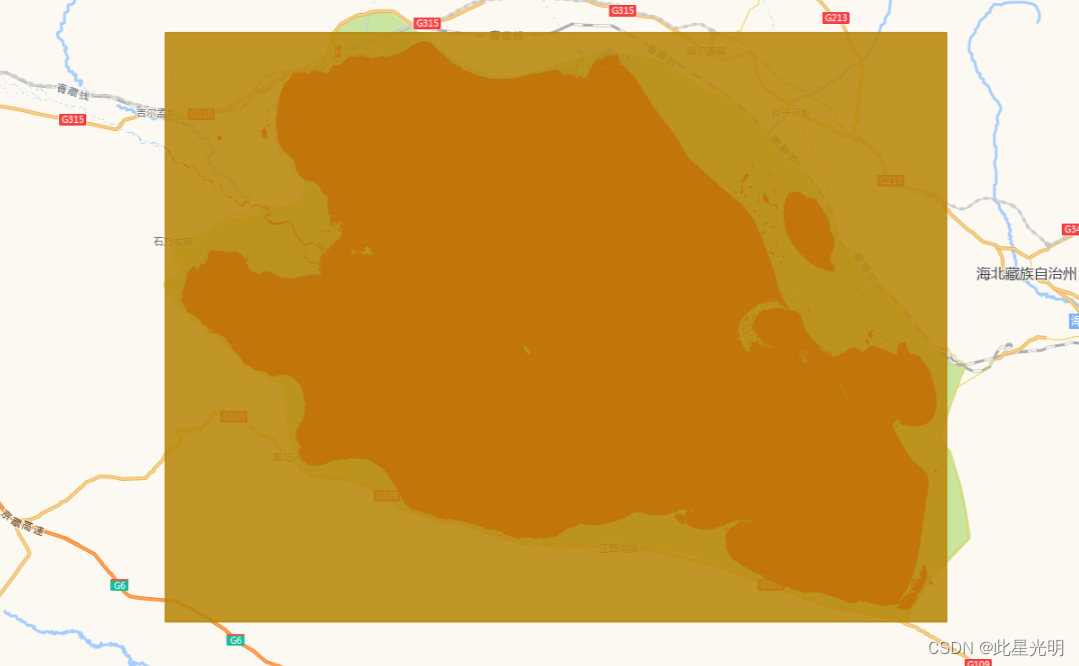
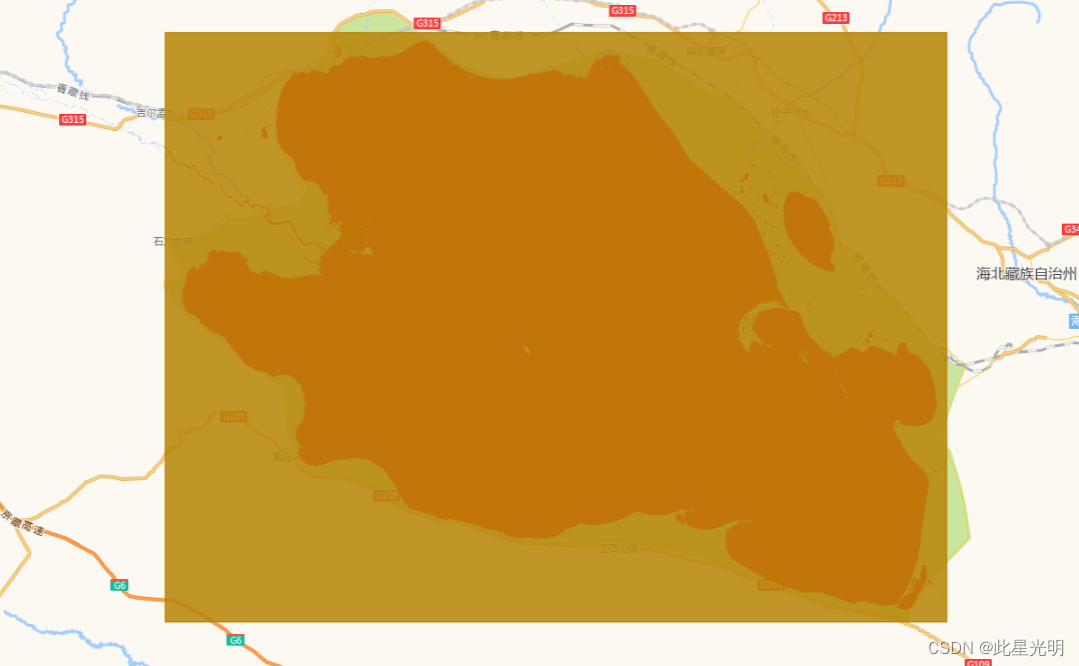
PIE-engine 教程 ——利用NDWI加载青海湖三年水域影像和面积计算
这里我们首先画一个自己选择的研究区,用于方便计算NDWI,这里我们将青海湖区域作为我们的研究区,第二步我们就是要设定一个函数,用于在函数中执行循环遍历,这里包括去云和影像筛选过程,最后按照最大值合成,最后我们分别加载影像,计算影像水域的面积分别用到的就是我们提到的pixelArea()和reduceregion(),在这个过程中我们可以设定一个水域变化面积的函数,用来展示每一面水体的面积变化情况,期间我们还可以构建动态展示效果,加载影像的三年湖水的动画效果。
PIE-engine 教程 ——利用NDWI加载青海湖三年水域影像和面积计算
这里我们首先画一个自己选择的研究区,用于方便计算NDWI,这里我们将青海湖区域作为我们的研究区,第二步我们就是要设定一个函数,用于在函数中执行循环遍历,这里包括去云和影像筛选过程,最后按照最大值合成,最后我们分别加载影像,计算影像水域的面积分别用到的就是我们提到的pixelArea()和reduceregion(),在这个过程中我们可以设定一个水域变化面积的函数,用来展示每一面水体的面积变化情况,期间我们还可以构建动态展示效果,加载影像的三年湖水的动画效果。
演进中的架构之无服务时代
无服务时代(Serverless)
如果说微服务架构是分布式系统这条路的极致,那无服务架构,也许就是“不分布式”的云端系统这条路的起点。
无服务初现
人们研究分布式架构,最初是由于单台机器的性能无法满足系统的运行需要,尽管后来架构演进过程中,容错能力、技术异构、职责划分等各方面因素都成为架构需要考虑的问题,但其中获得更好性能的需求在架构设计中依然占很大的比重。对软件研发而言,不去做分布式无疑才是最简单的,如果单台服务器的性能可以是无限的,那架构演进的结果肯定会与今天有很大的差别,分布式也好,容器化也好,微

什么样的点可以称为三维点云的关键点?
这个工作来自于中国香港科技大学和中国香港城市大学。我们知道,随着三维传感器以及相关扫描技术的进步,三维点云已经成为三维视觉领域内一项十分重要的数据形式。并且随着深度学习技术的发展,许多经典的点云深度学习处理方法被提出来。但是,现有的大多数方法都关注于点云的特征描述子学习。并且,在稠密的点云数据帧中,如果对所有点云都进行处理,将会带来巨大的计算和内存压力。针对这种问题,提取部分具有代表性的关键点则成为一种自然而且有效的策略。但是,什么样的点可以称为三维点云中的关键点呢?这个问题仍然是一个开放的、没有明确答案的问题。
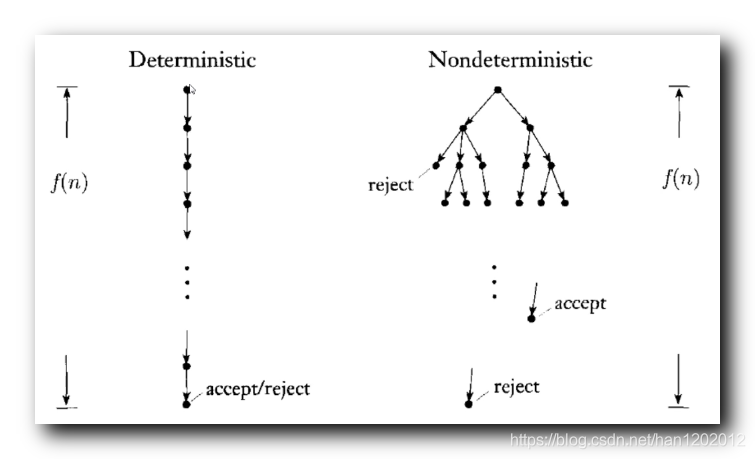
【计算理论】计算复杂性 ( 非确定性图灵机的时间复杂度 | 非确定性图灵机 与 确定性图灵机 的时间复杂度 之间的关系 )
给定一个非确定性图灵机 , 该图灵机是 判定机 , 在所有的输入上都会停机 , 肯定能得到一个 接受状态 或 拒绝状态 结果 ;
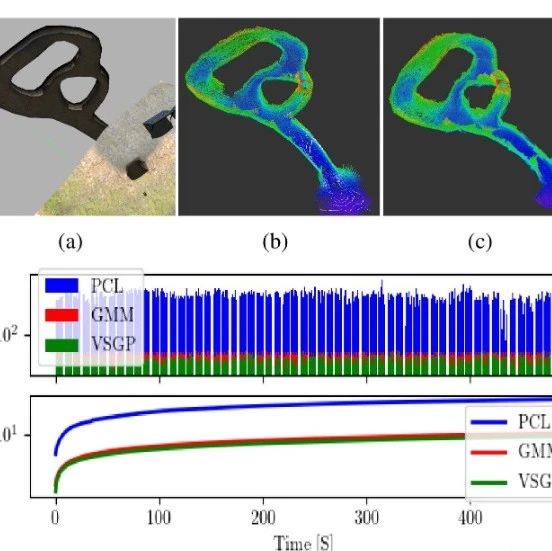
稀疏高斯过程的轻量级点云表示
本文提出了一个表示高保真点云传感器观测的框架,用于实现高效的通信和存储。该方法利用稀疏高斯过程将点云进行压缩编码。我们的方法只使用一个模型(一个2D稀疏高斯过程)来表示自由空间和被占据空间,而不是现有的双模型框架(两个3D高斯混合模型)。我们通过提出一种基于方差的采样技术来实现这一点,它可以有效地区分自由空间和被占据空间。这种新的表示方式需要更少的内存占用,并且可以通过有限带宽的通信通道进行传输。该框架在仿真中被广泛应用,并被一个配有3D激光雷达的真实移动机器人进行了验证。与发送原始点云相比,我们的方法使通信速率降低了70~100倍。
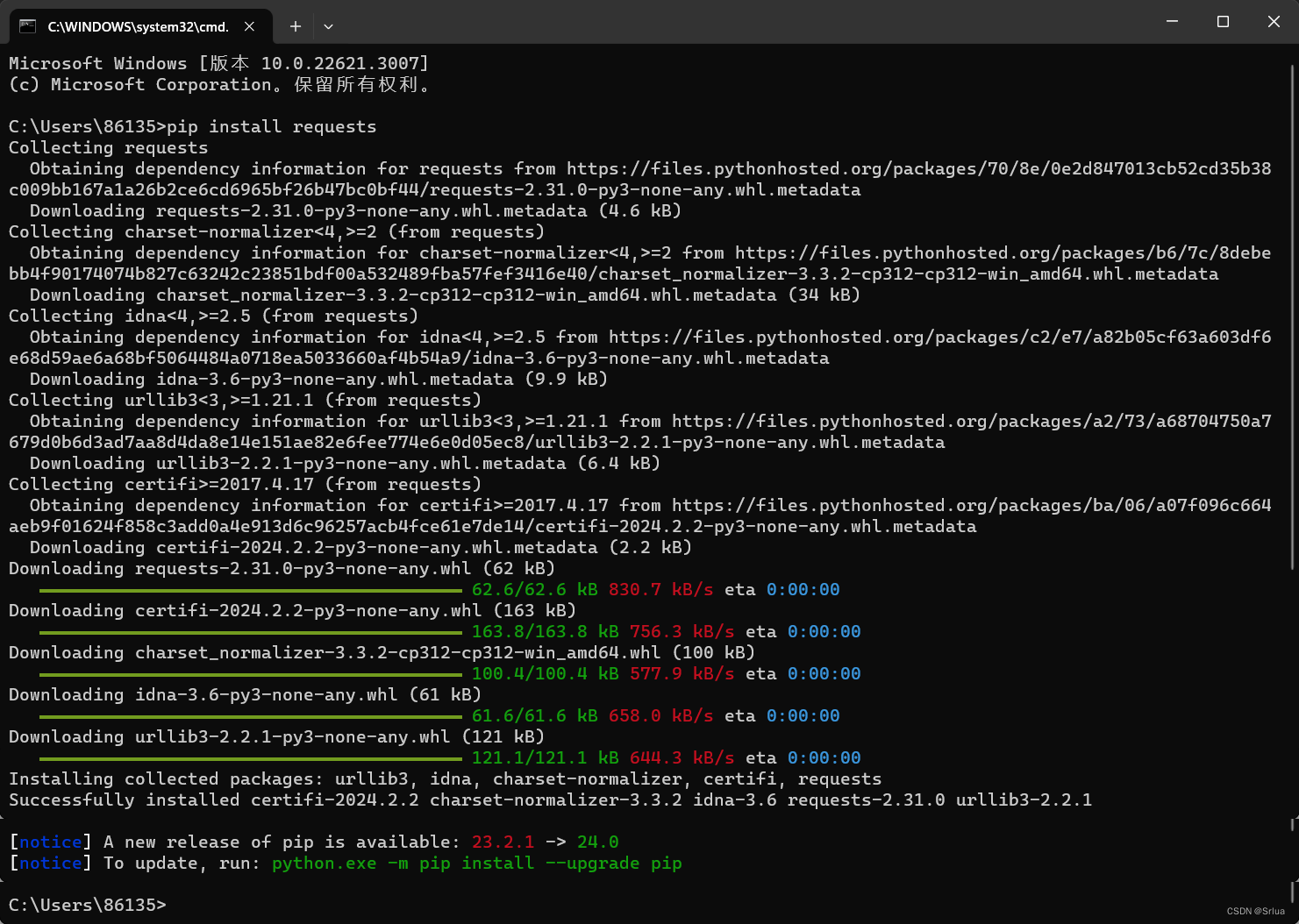
Python爬虫项目实战案例-批量下载网易云榜单音乐保存至本地
Win平台: “以管理员身份运行”cmd,执行pip install requests
落地4年,工商银行如何进行Serverless 架构迭代
作者 | 中国工商银行金融科技研究院云计算实验室
工商银行早在 2018 年便启动了 Serverless 技术的研究,通过将业界主流 Serverless 技术栈与行内“云计算 + 分布式”体系融合,建设了具备极致弹性伸缩能力的全托管 Serverless 平台,并在 AI 模型、批量任务、接口聚合等多个场景落地,有效提升了云上资源利用率和业务迭代效率。我们在这篇文章里分享了工商银行 Serverless 实践至今的经过、效果和经验,希望对大家有所帮助。
1 Serverless 的发展历程和业界现状

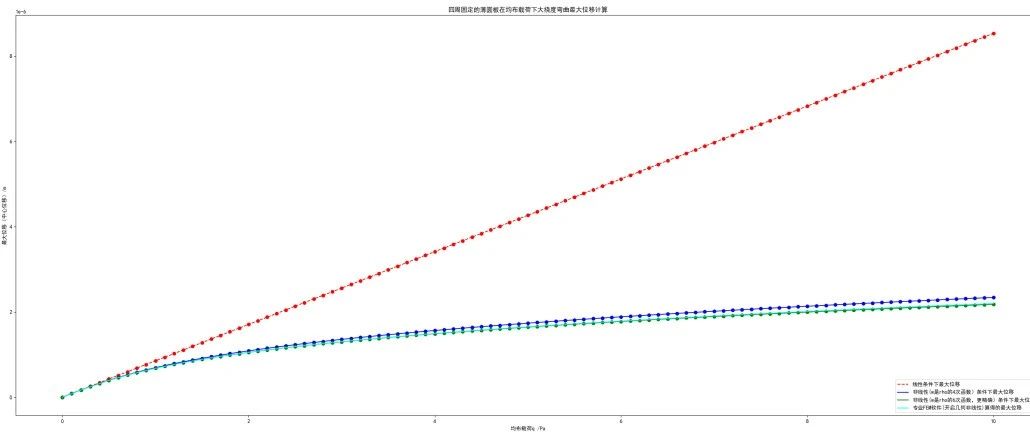
四周固定的圆板在均布载荷下大挠度弯曲的计算【2】
本篇代码功能和上一篇一样,只是优化了挠度函数,到代码语言:javascript复制from matplotlib import pyplot as pltimport numpy as np
import sympy
from scipy.optimize import fsolve
class RoundPlate(object):
"""四周固定圆板在均布载荷下大挠度弯曲求解"""
def __init__(self, E: float, nu: float, a: float, t: float):
...
Python小姿势 - Python学习笔记:如何使用Python创建一个简单的计算器
在本教程中,我们将学习如何使用Python创建一个简单的计算器。我们将学习如何使用Python的内置函数input()和print(),以及如何使用Python的运算符来完成这个项目。
【4月新功能速递】CLS 独家:索引字段支持别名、云产品日志中心一站式管理
在索引配置中,支持为字段设置别名,使用别名代替原始字段名称进行日志检索及统计分析,以简化日志检索与统计分析操作流程。例如,为__SOURCE__字段设置别名ip。
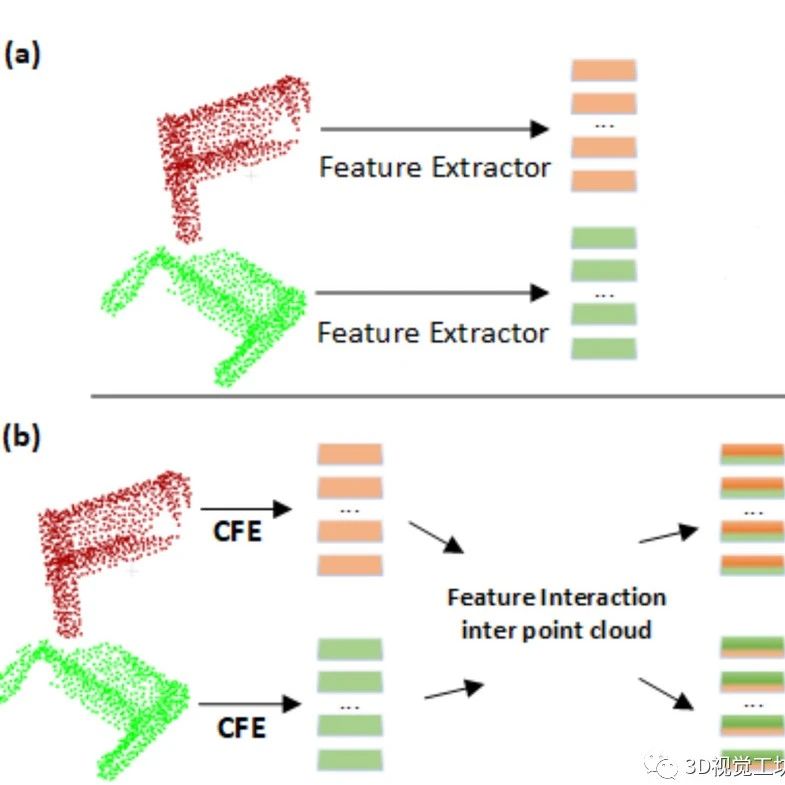
点云配准任务中的点特征与一般点特征的区别在哪里?
这个工作来自于华中科技大学,发表于ICCV 2021。这个工作聚焦于点云的点特征表示学习,但是,与一般的点特征学习方法并不一样。我们知道,基于深度学习的三维点云处理已经在近年来得到了广发关注,从先驱性的工作例如PointNet到近期的Point Transformer等。这些工作都能有效的学习点特征表示。但是,这些方法学习点特征都是基于输入的某一个点云而言的,所有的操作也都集中在一个点云上,并且追求特征的描述性,力求能准确表示三维点云的局部几何结构。但是,这篇论文针对点云配准工作提出了另一种点云设计方式。我们知道配准的目的是求解输入的点云对之间的相对变换以使它们最好的对齐,在这个过程中,聚焦于用学到的点特征表示构造可靠的匹配对。为此,对于点特征的鲁棒性需求也很重要。为了实现这个目的,本工作提出从输入的两个点云出发,利用这两个点云之间的交互进一步调整点特征学习,使得到的点特征表示源于同时感知到当前点云和另一个需要配对的点云,从而追求正确的匹配点的可匹配性的提升。也就是说这是一个针对特定任务而设计的点特征学习方法,或许此方法学到的点特征难以应用到其他任务,例如分类、分割等,但对于匹配、配准而言应该更加适用。
【Rust日报】2023-07-21 reddit讨论小整理:分布式计算中的Rust
以下内容来自reddit 社区(Distributed computing in Rust, https://www.reddit.com/r/rust/comments/155hxlf/distributed_computing_in_rust/),由小编重新整理后发布,读起来也许会更流畅些,因为在整理过程中,会揉一些小遍的思考进去,感兴趣的小伙伴,可以在读完本文后,去读读原文,链接在上方。因为是边看reddit,边译边写边思考,可能行文会有些乱。见谅!
【备战蓝桥杯】如何使用Python 内置模块datetime去计算我与CSDN相遇的天数
#mermaid-svg-zGLqSFRpGlvyy4qs {font-family:"trebuchet ms",verdana,arial,sans-serif;font-size:16px;fill:#333;}#mermaid-svg-zGLqSFRpGlvyy4qs .error-icon{fill:#552222;}#mermaid-svg-zGLqSFRpGlvyy4qs .error-text{fill:#552222;stroke:#552222;}#mermaid-svg-zGLqSFRpGlvyy4qs .edge-thickness-normal{stroke-width:2px;}#mermaid-svg-zGLqSFRpGlvyy4qs .edge-thickness-thick{stroke-width:3.5px;}#mermaid-svg-zGLqSFRpGlvyy4qs .edge-pattern-solid{stroke-dasharray:0;}#mermaid-svg-zGLqSFRpGlvyy4qs .edge-pattern-dashed{stroke-dasharray:3;}#mermaid-svg-zGLqSFRpGlvyy4qs .edge-pattern-dotted{stroke-dasharray:2;}#mermaid-svg-zGLqSFRpGlvyy4qs .marker{fill:#333333;stroke:#333333;}#mermaid-svg-zGLqSFRpGlvyy4qs .marker.cross{stroke:#333333;}#mermaid-svg-zGLqSFRpGlvyy4qs svg{font-family:"trebuchet ms",verdana,arial,sans-serif;font-size:16px;}#mermaid-svg-zGLqSFRpGlvyy4qs .label{font-family:"trebuchet ms",verdana,arial,sans-serif;color:#333;}#mermaid-svg-zGLqSFRpGlvyy4qs .cluster-label text{fill:#333;}#mermaid-svg-zGLqSFRpGlvyy4qs .cluster-label span{color:#333;}#mermaid-svg-zGLqSFRpGlvyy4qs .label text,#mermaid-svg-zGLqSFRpGlvyy4qs span{fill:#333;color:#333;}#mermaid-svg-zGLqSFRpGlvyy4qs .node rect,#mermaid-svg-zGLqSFRpGlvyy4qs .node circle,#mermaid-svg-zGLqSFRpGlvyy4qs .node ellipse,#mermaid-svg-zGLqSFRpGlvyy4qs .node polygon,#mermaid-svg-zGLqSFRpGlvyy4qs .node path{fill:#ECECFF;stroke:#9370DB;stroke-width:1px;}#mermaid-svg-zGLqSFRpGlvyy4qs .node .label{text-align:center;}#mermaid-svg-zGLqSFRpGlvyy4qs .node.clickable{cursor:pointer;}#mermaid-svg-zGLqSFRpGlvyy4qs .arrowheadPath{fill:#333333;}#mermaid-svg-zGLqSFRpGlvyy4qs .edgePath .path{stroke:#333333;stroke-width:2.0px;}#mermaid-svg-zGLqSFRpGlvyy4qs .flowchart-link{stroke:#333333;fill:none;}#mermaid-svg-zGLqSFRpGlvyy4qs .edgeLabel{background-color:#e8e8e8;text-align:center;}#mermaid-svg-zGLqSFRpGlvyy4qs .edgeLabel rect{opacity:0.5;background-color:#e8e8e8;fill:#e8e8e8;}#mermaid-svg-zGLqSFRpGlvyy4qs .cluster rect{fill:#ffffde;stroke:#aaaa33;stroke-width:1px;}#mermaid-svg-zGLqSFRpGlvyy4qs .clust

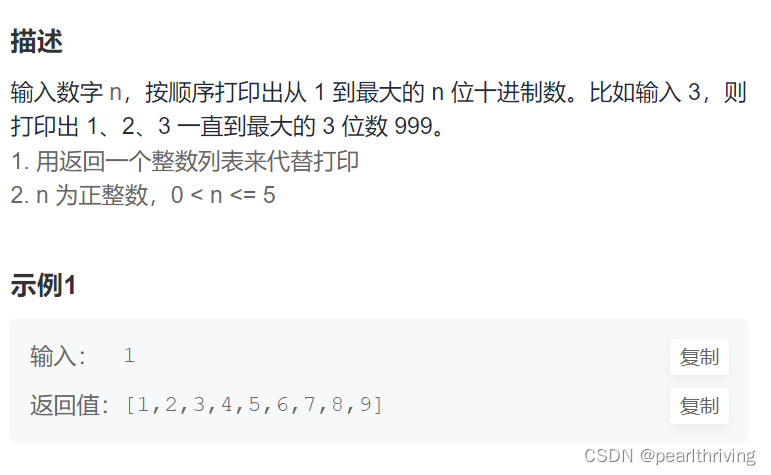
每日一题吼吼吼(打印从1到最大n位数,计算是第几天)
快过年了,咱们这代码的功夫不能停,特此推出一日一题特别栏目,欢迎您的光临~(乱入)俺写的解析超级详细,超级适合刚上路的新手!
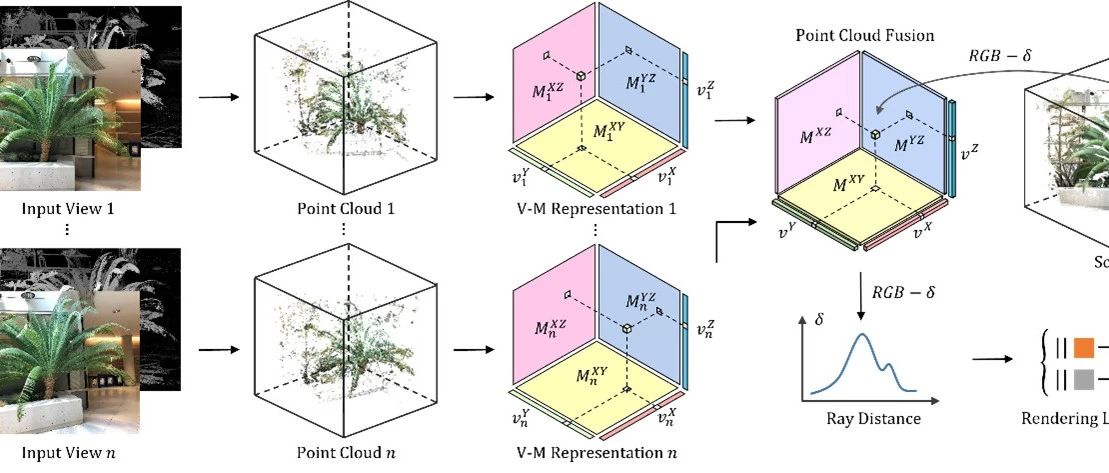
AAAI 2024 | 深度引导的快速鲁棒点云融合的稀疏 NeRF
具有稀疏输入视图的新视角合成方法对于AR/VR和自动驾驶等实际应用非常重要。大量该领域的工作已经将深度信息集成到用于稀疏输入合成的NeRF中,利用深度先验协助几何和空间理解。然而,大多数现有的工作往往忽略了深度图的不准确性,或者只进行了粗糙处理,限制了合成效果。此外,现有的深度感知NeRF很少使用深度信息来创建更快的NeRF,总体时间效率较低。为了应对上述问题,引入了一种针对稀疏输入视图量身定制的深度引导鲁棒快速点云融合NeRF。这是点云融合与NeRF体积渲染的首次集成。具体来说,受TensoRF的启发,将辐射场视为一个的特征体素网格,由一系列向量和矩阵来描述,这些向量和矩阵沿着各自的坐标轴分别表示场景外观和几何结构。特征网格可以自然地被视为4D张量,其中其三个模式对应于网格的XYZ轴,第四个模式表示特征通道维度。利用稀疏输入RGB-D图像和相机参数,我们将每个输入视图的2D像素映射到3D空间,以生成每个视图的点云。随后,将深度值转换为密度,并利用两组不同的矩阵和向量将深度和颜色信息编码到体素网格中。可以从特征中解码体积密度和视图相关颜色,从而促进体积辐射场渲染。聚合来自每个输入视图的点云,以组合整个场景的融合点云。每个体素通过参考这个融合的点云来确定其在场景中的密度和外观。
C++一分钟之-编译时计算:constexpr与模板元编程
在C++的世界里,编译时计算是一种强大的技术,它允许程序在编译阶段完成计算任务,从而提高运行时性能并增强代码的类型安全。constexpr与模板元编程是实现这一目标的两大利器。本文将深入浅出地探讨这两者的基础、常见问题、易错点及其规避策略,并通过实例代码加以说明。
PIE-engine 教程 ——MODIS影像去云教程(山西省为例)
本次我们将分别使用两个流程完成对MODIS影像去除云,第一个就是先去云然后再合成,第二个方式是先合成后去云,我们通常情况下一般都是先去云再合成。

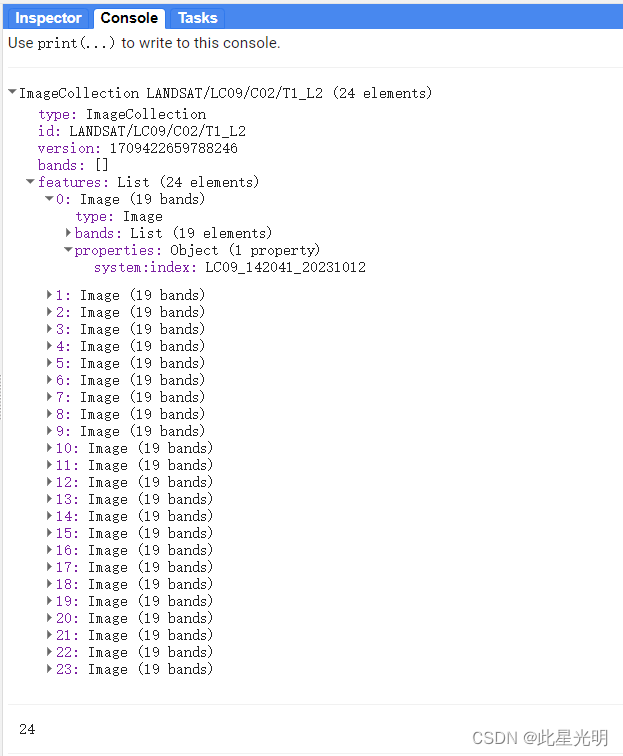
GEE错误——Landsat9数据集进行去云操作后显示白板
我遇到了一些有关 Landsat9 图像中的云遮蔽和图像处理的问题。我正在分享我所使用的代码以及我感兴趣的区域(资产)。请帮我解决这个问题。我是一名 GEE 学习者。问题:最终图像在大面积上有云状覆盖。