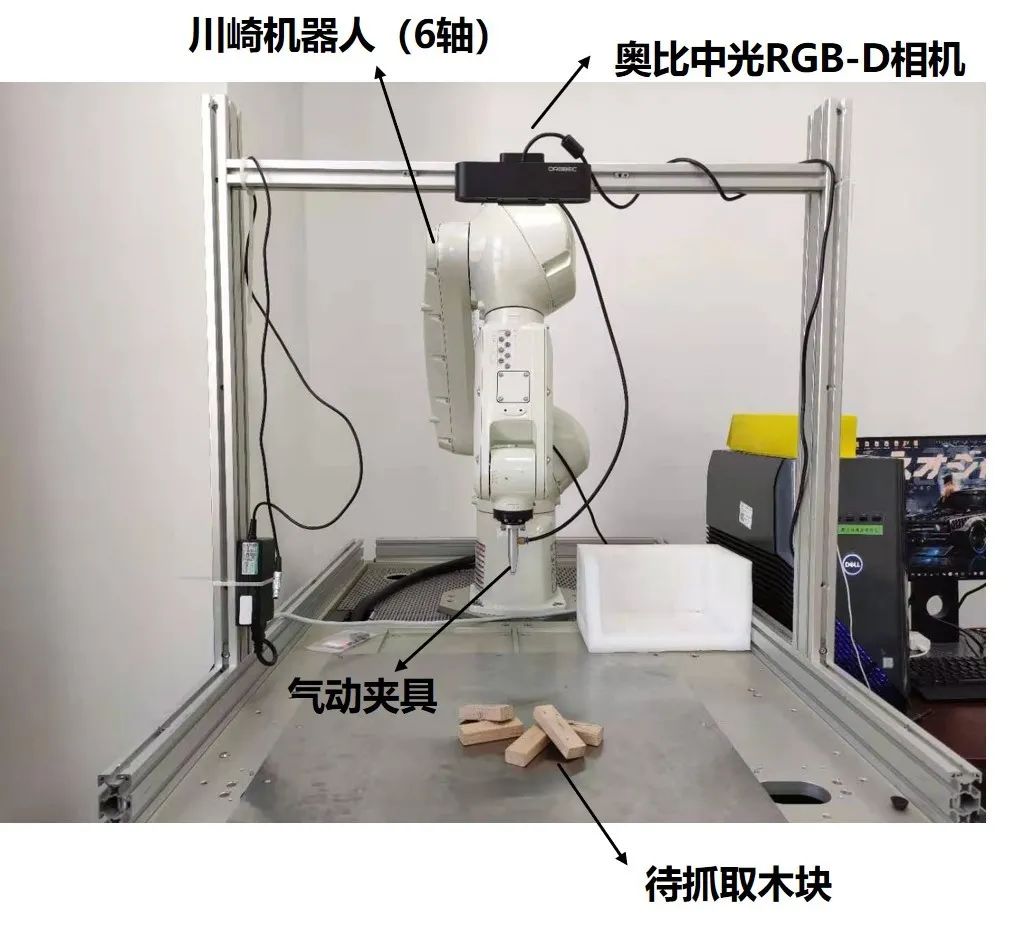
基于RGB-D相机的机械臂无序抓取系统
利用奥比中光科技集团股份有限公司提供的Zora P1开发板、 RGBD相机,以及深圳大学物理与光电工程学院智能光测研究院提供的川崎机器人(6轴)开发出了一款RGB-D相机结合机械臂对任意摆放的复杂加工零件的三维重建及无序抓取系统。
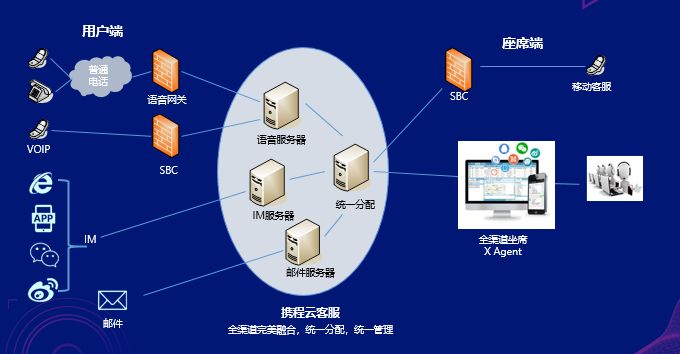
干货 | 携程基于云的软呼叫中心及客服平台架构实践
蒲成,携程云客服平台研发部资深研发经理。2015年底加入携程从事呼叫中心相关产品的研发工作,主导建设了携程呼叫中心智能语音平台、统一配置中心,目前正在努力推进云客服平台的设计研发工作。
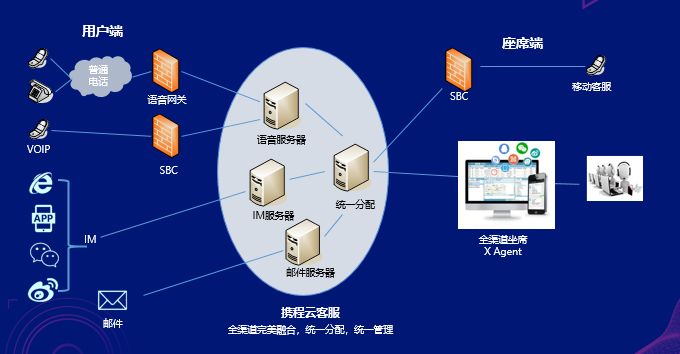
干货 | 携程基于云的软呼叫中心及客服平台架构实践
蒲成,携程云客服平台研发部资深研发经理。2015年底加入携程从事呼叫中心相关产品的研发工作,主导建设了携程呼叫中心智能语音平台、统一配置中心,目前正在努力推进云客服平台的设计研发工作。
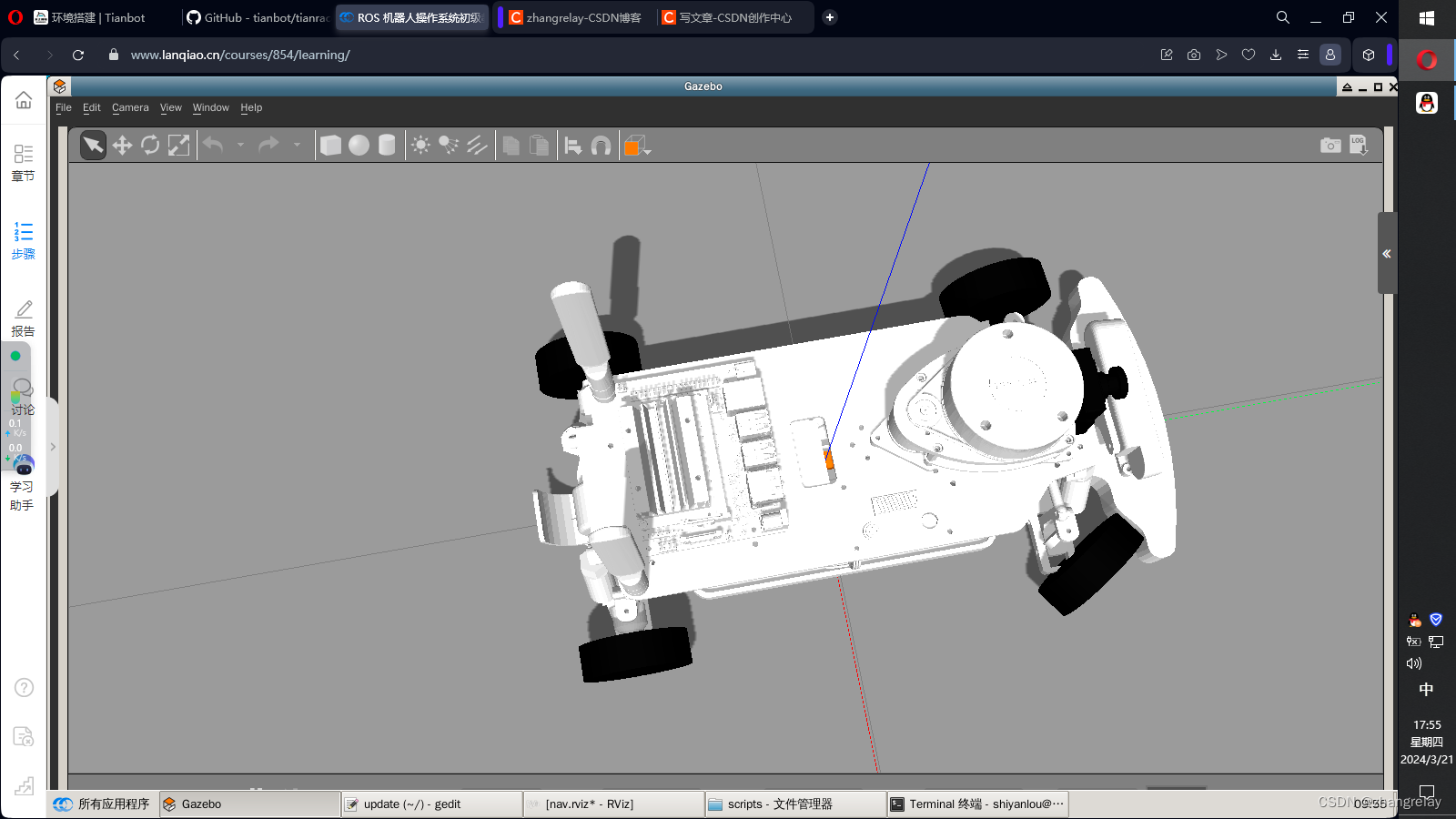
ROS机器人虚拟仿真挑战赛蓝桥云课环境配置记录
目标:
该脚本的主要目标是安装ROS Kinetic版本的相关包,配置一个名为tianracer的机器人项目,并在Gazebo仿真环境中启动这个项目的演示。
ROS机器人虚拟仿真挑战赛蓝桥云课环境配置记录
目标:
该脚本的主要目标是安装ROS Kinetic版本的相关包,配置一个名为tianracer的机器人项目,并在Gazebo仿真环境中启动这个项目的演示。
2020边缘计算状态报告:2028年企业IT基础设施边缘支出将达87亿美元
“边缘化”是指人或事物从中心和主流位置向“非中心”、“非主流”方向移动。而本次报告指出,与主流思想相反的是,边缘化很重要,未来网络的“边缘化”将会成为行业大趋势。
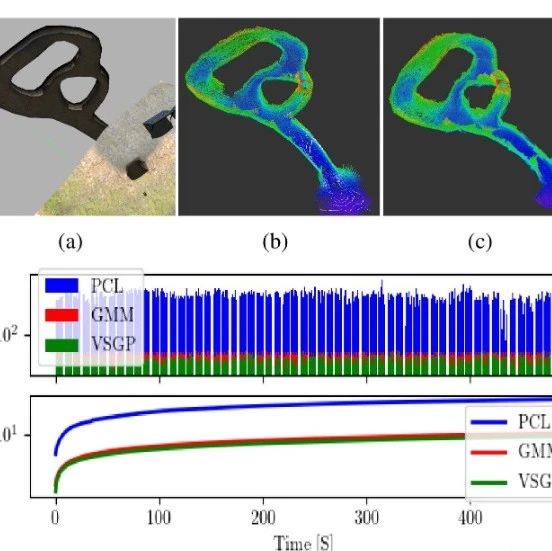
稀疏高斯过程的轻量级点云表示
本文提出了一个表示高保真点云传感器观测的框架,用于实现高效的通信和存储。该方法利用稀疏高斯过程将点云进行压缩编码。我们的方法只使用一个模型(一个2D稀疏高斯过程)来表示自由空间和被占据空间,而不是现有的双模型框架(两个3D高斯混合模型)。我们通过提出一种基于方差的采样技术来实现这一点,它可以有效地区分自由空间和被占据空间。这种新的表示方式需要更少的内存占用,并且可以通过有限带宽的通信通道进行传输。该框架在仿真中被广泛应用,并被一个配有3D激光雷达的真实移动机器人进行了验证。与发送原始点云相比,我们的方法使通信速率降低了70~100倍。
GAN、云原生、分布式系统、自动驾驶…哪些技术撑起今年618?
韩智 发自 凹非寺
量子位 报道 | 公众号 QbitAI
又是一年618。
电商APP里满眼「限时疯抢好物」「低至5折」,朋友圈地铁广告铺开,各家巨头抱着百亿「子弹」一次杀入战场。
中国基金报数据显示,去年618交易额已经突破万亿,首次超过同年双十一,成就全球最大规模消费盛宴。看今年,618势头自然只热不凉。
穿透现象看本质,你看到的618是营销术语、明星加持、补贴打法——
这背后是一个牵扯甚广、无比复杂的体系,大量技术应用和科技创业者们撑起了这场万亿狂欢。
对每个关心科技的人,这可比剁手有意思多了。

ROS1云课→29如何借助导航实现走迷宫机器人
简述:
在这个项目中,将创建一个机器人,它将进入一个迷宫形式的房间,然后从另一个点离开房间。
前沿探索 | 腾讯云X世界机器人大赛挑战脑控科研“高精尖”!
要问这个夏天“云界”最硬核的技术角逐是什么?
当然是有着机器人界“奥林匹克”之称的
2022世界机器人大赛!
8月18日-21日
世界机器人大赛-BCI脑控机器人大赛
“腾讯云杯”技术赛总决赛
将在北京亦创国际会展中心精彩上演
顶级科研技术团队和高校学霸云集于此
以科技力量探索未来答案
BCI(Brain Computer Interface)脑机接口技术
如何满足人们在医疗、养老、康复等
多样化的民生需求?
科研人员如何从众多脑电信号中获取有效信息?
实现用意念控制外部设备还需要多久?
你都将在这场赛

BAT掌门-马云 | 马化腾 | 李彦宏语出惊人!同台激辩(附视频)
首届2018中国国际智能产业博览会(简称智博会)在重庆开幕。本届智博会围绕大数据、云计算、人工智能、区块链等主题进行。
ROS1云课→29如何借助ROS实现走迷宫机器人
简述:
在这个项目中,将创建一个机器人,它将进入一个迷宫形式的房间,然后从另一个点离开房间。

ROS1云课→26机器人Gmapping等环境地图构建
最近,引入了 Rao-Blackwellized 粒子滤波器作为解决同时定位和建图(SLAM) 问题的有效手段。 这种方法使用粒子过滤器,其中每个粒子都带有一个单独的环境图。 因此,一个关键问题是如何减少粒子的数量。 Gmapping提出了自适应技术来减少 Rao-Blackwellized 粒子滤波器中的粒子数量,以学习网格图。 Gmapping提出了一种计算准确提议分布的方法,该方法不仅考虑了机器人的运动,还考虑了最近的观察结果。 这大大降低了过滤器预测步骤中机器人姿势的不确定性。 此外,Gmapping采用一种方法来选择性地执行重新采样操作,从而严重减少了粒子耗尽的问题。
2014CENCE&CCS大会闭幕 劲爆内容大盘点
第十六届CENCE中国企业网络通信大会&第七届CCS云计算高峰论坛暨展览于昨日落下帷幕,会中观点激荡,“高大上”厂商云集,各类新品频出。以下来看小编为大家带来的劲爆内容大盘点。
百家争鸣:CENCE

蓝桥ROS云课→一键配置←f1tenth和PID绕圈
前轮转向移动机器人的实验目的是为了让学生了解和掌握前轮转向移动机器人的基本原理和控制方法,以及学习机器人运动学方面的知识。此外,该实验还可以培养学生的动手能力和团队合作精神,提高学生的实验操作能力和实验设计能力。

机器认知、人机交互、边缘计算……在这里,他们谈论了关于AI的关键议题
这些在AI领域时刻被探讨的话题,在今天的2019中国(深圳)IT领袖峰会上,有了一些不一样的答案。

计算机控制技术课程配套教材习题解答(第1、2、3章)
硬件包括计算机、过程输入输出通道及接口、人机联系设备及接口、外部存储器等。计算机的关键部件是中央处理器(CPU),CPU通过接口接收人的指令和工业对象的各种参数,并向系统各部分发送各种命令数据,完成巡回检测、数据处理、控制计算、逻辑判断等工作。
拥有人工智能的机器人能否取代人类?听大牛怎么说
微软Build开发者大会、Facebook F8开发者大会以及Google I/O开发者大会被称为行业的风向标,而人工智能已成为绝大多数开发人员无法绕过的技术,聊天机器人、人工智能助理的流行,也预示着应用交互界面将迎变革。人工智能带来哪些困扰和机遇?未雨绸缪,移动开发者应当如何借势人工智能?本次人工智能专场将汇聚人工智能领域的技术精英,解析如何利用人工智能前沿技术,让应用好看、好用、好玩。
本文将带您全方位了解MDCC 2016人工智能与机器人专访细则,大会门票 8 折优惠将于明天结束,欲购从速!五人以上团
3D视觉技术在机器人抓取作业中的应用实例
摘要:近年来,机器人自动化领域越来越多地应用3D视觉技术对目标物体进行定位。本文主要研究3D视觉技术在机器人抓取作业中的应用,总结了3D视觉技术在识别、定位物体时面临的挑战,给出了抓取作业机器人3D视觉系统的设计方法,归纳了现有的3D表面成像方法和视觉处理算法,最后给出一个结合3D视觉技术对白色抽屉纸盒进行抓取分拣的实际应用案例。
万物智能融入生活——奇点临近
人与万物已经进入智能链接的时代,万物智能将融入生活的各个场景中,人与机器协调生活,互相依靠,成为未来智慧生活的场景。