ROS机器人虚拟仿真挑战赛蓝桥云课环境配置记录
目标:
该脚本的主要目标是安装ROS Kinetic版本的相关包,配置一个名为tianracer的机器人项目,并在Gazebo仿真环境中启动这个项目的演示。
ROS机器人虚拟仿真挑战赛蓝桥云课环境配置记录
目标:
该脚本的主要目标是安装ROS Kinetic版本的相关包,配置一个名为tianracer的机器人项目,并在Gazebo仿真环境中启动这个项目的演示。
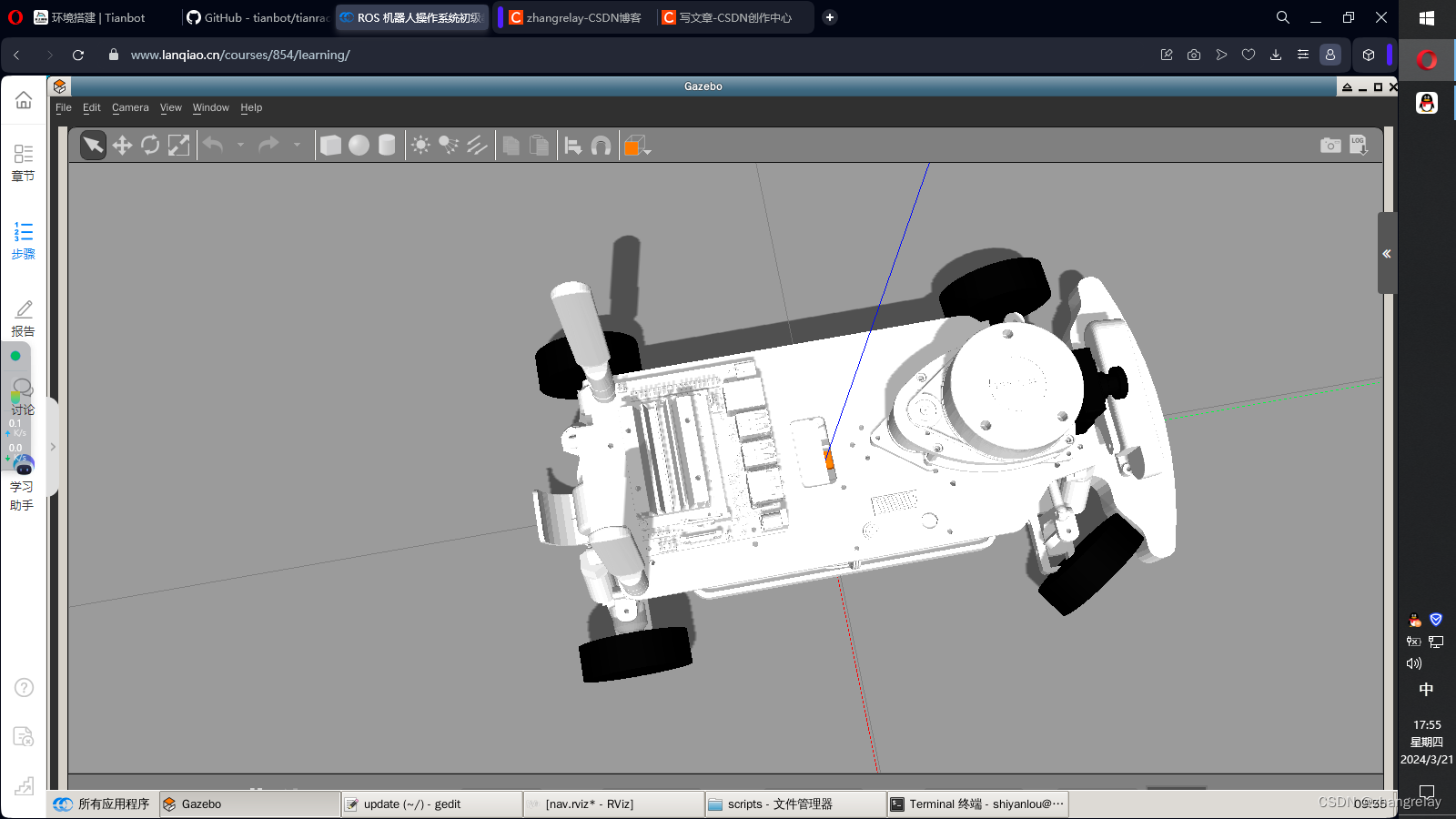
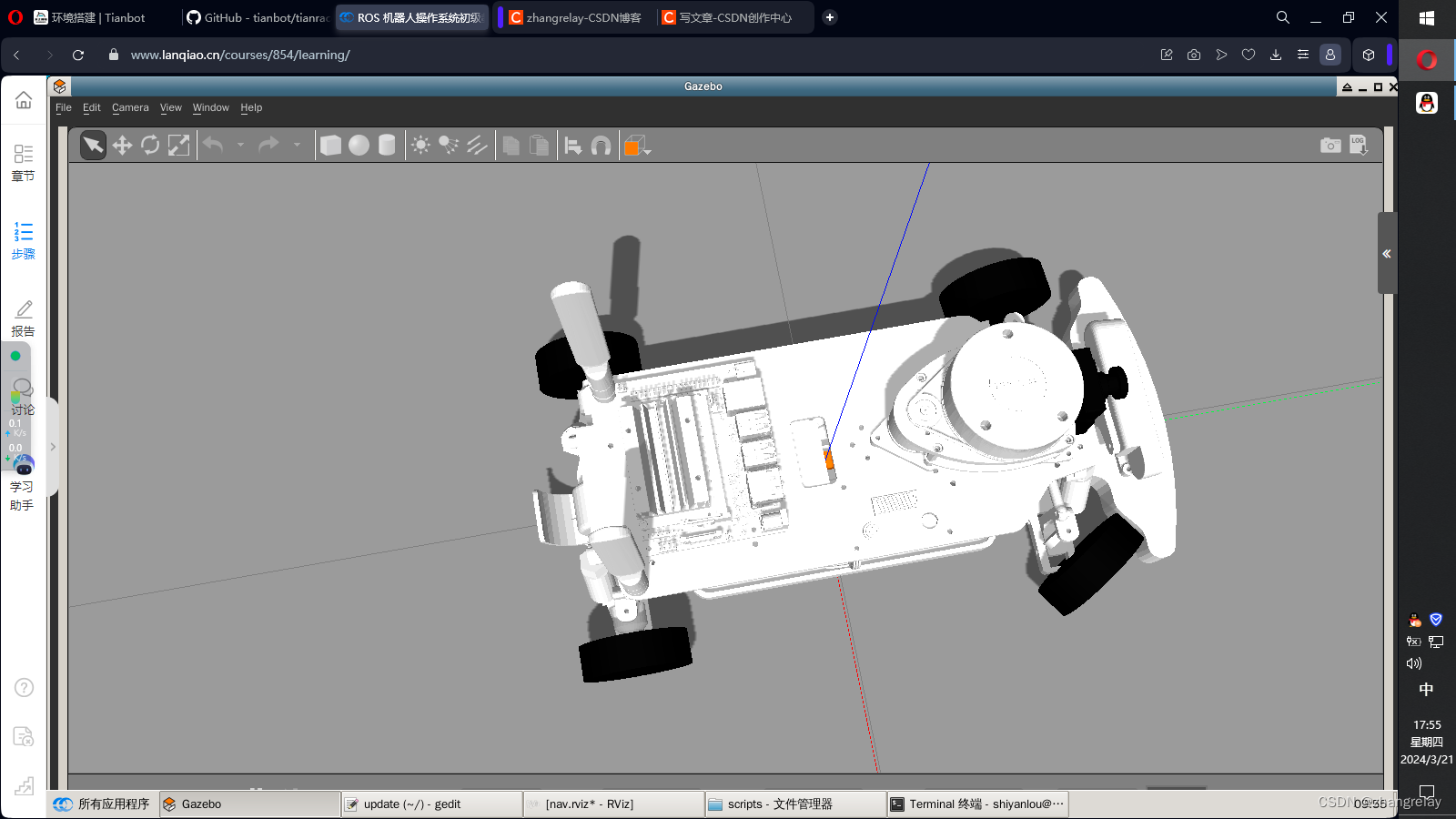
蓝桥ROS云课→一键配置←f1tenth和PID绕圈
前轮转向移动机器人的实验目的是为了让学生了解和掌握前轮转向移动机器人的基本原理和控制方法,以及学习机器人运动学方面的知识。此外,该实验还可以培养学生的动手能力和团队合作精神,提高学生的实验操作能力和实验设计能力。

2023年ROS1&2数据指标
近期,ROS(机器人操作系统)社区发布了其年度指标报告,旨在评估社区的整体健康、福祉和成长情况。该报告汇集了来自各种ROS项目和服务的数据,为社区提供了一个关于其增长和构成的快照。今年,由于重大变化,如Google Analytics的升级和answers.ros.org的迁移,指标的收集过程也进行了相应的调整。

Ubuntu18.04安装ROS1(解决rosdep init问题)
一般文章都要写在软件设置里面选中3种不同的软件渠道,其实默认就是选中的,当然可以自己再看看。
ROS2 Humble测试版安装笔记
docs.ros.org/en/humble/Installation/Ubuntu-Install-Debians.html