基于SLAM点云数据的BIM模型重建
01、引言
建筑信息化是当今各个行业、各个领域发展的趋势,建筑信息模型等空间信息化建设技术已经成为社会发展不可或缺的一部分,它最突出的特点便是能够运用信息技术创建出贴合实际的数字化模型,从信息角度、三位视角对建筑的生命全周期进行反映、控制和管理。在以往的建筑保护管理工作中,以计算机辅助设计技术取代手工绘图被称为建筑文化发展的第一次数字革命。现在,作为一项新兴技术的三维可视化技术足以引发建筑文化发展的第二次技术革命,在这种大背景下,如何利用新兴技术服务与建筑的保护、管理、修复等工作,已经成为广大从业者必须要考虑和学习的问题。
常规的建模技术需要具体的原始数据作为参考,即对已有建筑的“实际复制”,根据现实中已经存在的建筑进行数据采集和建模等。现在应用广泛的原始数据获取手段主要是无人机航飞、RTK实测、激光点云扫描等方法,在实际的应用过程中也都各有利弊。无人机航飞具有大范围、高效率等优点,但是对周围环境的要求也较高,对于针对性较强,范围较小的测区不适用且不能获取室内空间信息。RTK实测技术可实现平面数据的获取,但人工成本高、效率低,无法做到地物的可视化显示。激光点云技术根据其应用形式可分为机载、车载、架站和背包几种,在对建筑信息化领域,能够做到室内外一体化数据获取的便要用到静态架站和背包SLAM技术,相对于架站形式的繁琐和不便携,小巧灵活的背包SLAM形式更受到人们的喜欢。
02、基于RTK-SLAM点云数据获取
设备介绍
SR-RL8是一款适用于多场景、大空间的三维信息数据获取设备,基于RTK-SLAM技术,在利用SLAM技术获得空间三维信息的同时,将RTK控制点自动引入到SLAM算法中进行联合解算,最终得到具有高精度绝对坐标的点云数据成果。

设备优势
Ø 外业数据采集速度极快,精度极高,通过稳定的SLAM算法,可快速获取高精度的点云数据;
Ø 激光扫描仪360度旋转扫描,点密度为64万点/秒,能够覆盖全部空间,相比固定式激光扫描仪,移动式没有缺扫漏扫的问题;
Ø 双电池、热插拔的设计不限制单次作业扫描时长,作业人员可按照场景和项目需求合理安排作业;
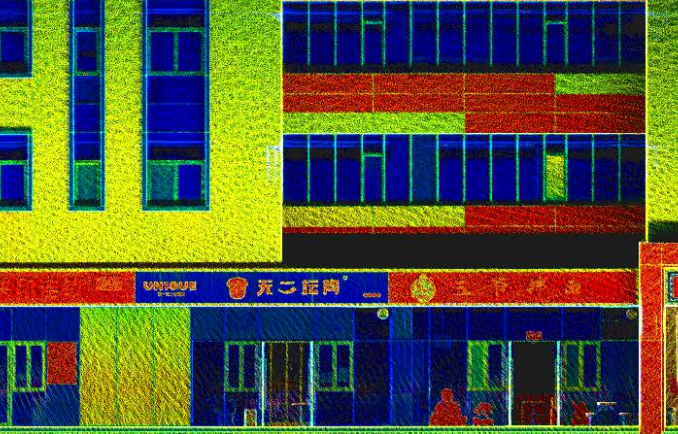
Ø 设备搭载2100万像素的全景相机,在扫描的同时获取丰富的照片纹理,将最终解算后成果赋予真实色彩,极大地提高最终成果的美观性和内业人员的地物判读能力;
Ø 点云坐标可自动转换到CGCS2000坐标、WGS84坐标或当地坐标等,无需通过导入人工控制点的方式转换坐标;
Ø 内业点云解算时间短,自动化程度高,无需人工干预,短时间便能获得配准好的点云数据;
Ø 可使用移动通讯设备(如手机、平板)等进行操作,简单方便;
Ø 可实现室内外、地上地下空间的一体化、连续化地扫描作业。

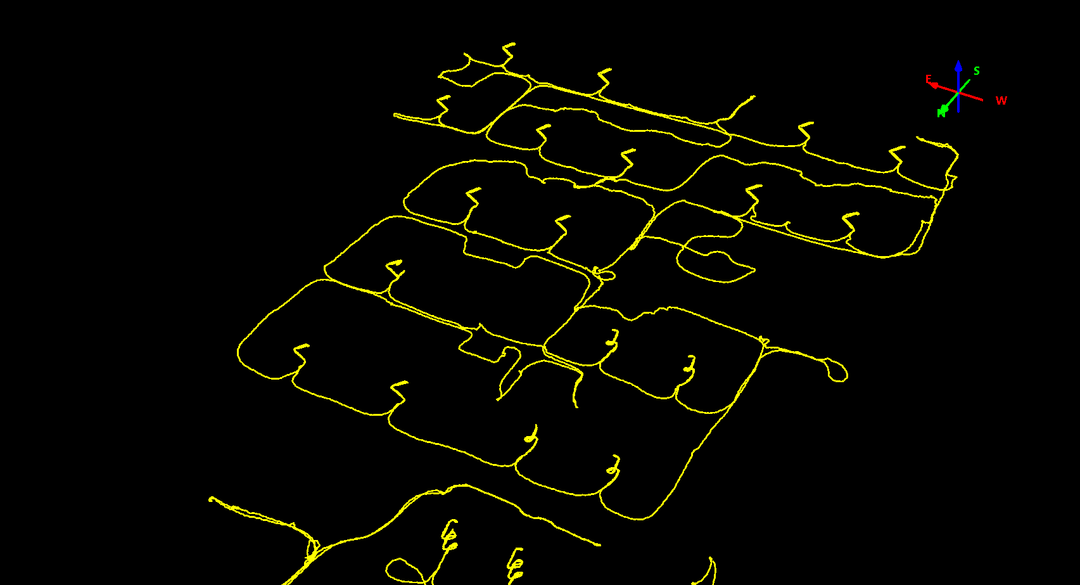
数据获取
对测区情况进行了解,针对测区的实际情况制定采集方案,现场连接千寻网络RTK或业主方提供的CORS开始数据采集,针对建筑物进行环形一周的行走路线,无需闭环,确保扫描建筑物信息完整即可。
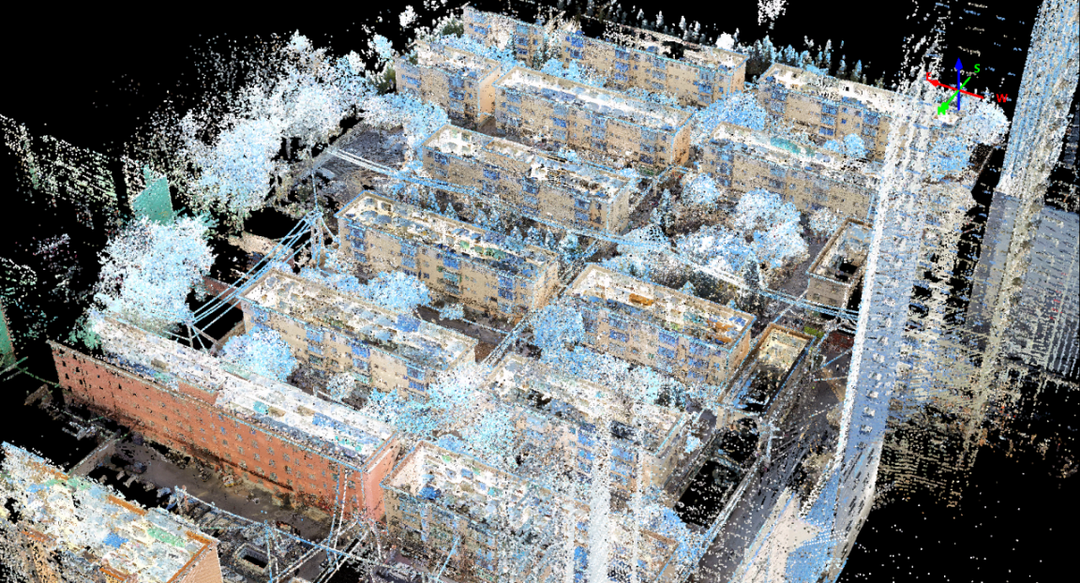

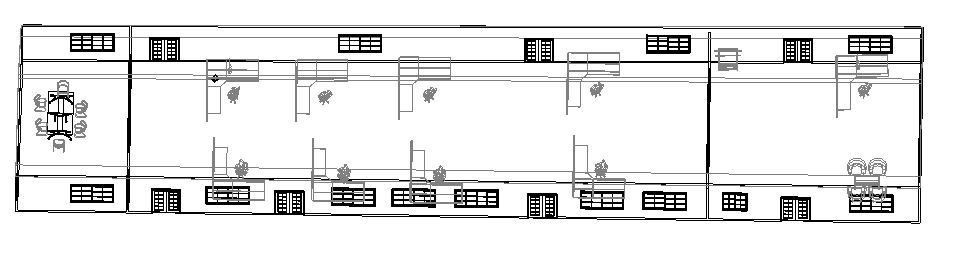
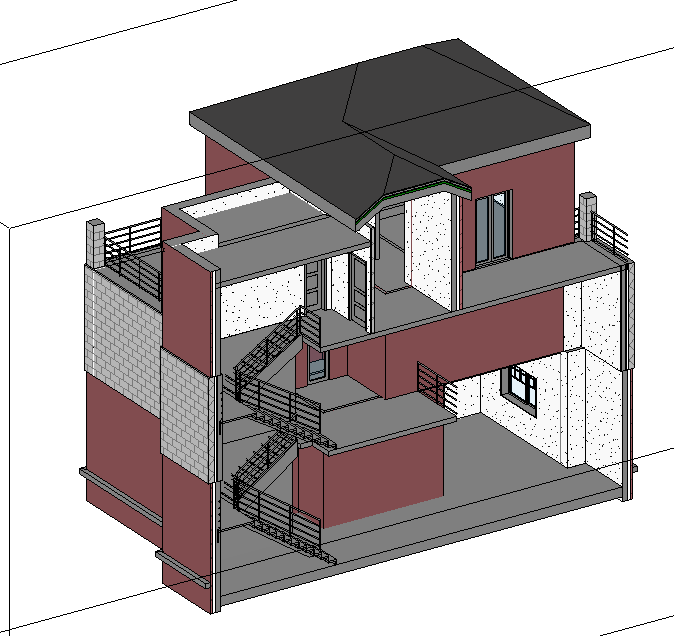
03、BIM模型重建
首先将获取的点云数据转换为点云项目或点云项目的索引格式插入Revit软件中作为模型建立的真实参照。然后建立标高和轴网,标高用以确定建筑物的高度,为建筑物层高、室内外高差、屋顶标高等主体构建提供高度参照。轴网是用于建筑物平面结构位置的确定,如梁板、门和窗户等,可以通过标高和轴网进行建筑物模型的整体布局。最后根据需要插入构件族模型,调整参数,使其达到与建筑物实际情况相符合的尺寸,根据具体的布置要求将各个构件放置在准确位置上。
案例一:俄式建筑保护工程

案例二:某俱乐部内外一体化管控

04、结语
近年来,随着信息化技术深入到社会各个领域中,利用三维激光扫描技术与BIM技术对建筑进行数字化处理成为研究热点,而基于RTK-SLAM技术的BIM模型重建技术不仅实现了建筑管理的信息化、智能化,为智慧城市建设提供保障,在古建筑保护中也发挥着不可替代的作用