理解云机器人有三个关键点:知识共享、业务协同与人机交互。
作者 | 来自镁客星球的韩平
时当三月,风和日暖。值此初春,我们有幸参加了在南京江宁举办的2022年新品发布会工业机器人产业链座谈会。
关于工业机器人行业,当下最受关注产业方向之一就是云机器人。
2010年,美国机器人专家James Kuffner在IEEE/RAS国际仿人机器人会议上首次提出“云机器人”的概念。在制造业中,这种基于云的机器人系统可以从专业知识库中学习处理诸如穿线或电缆或对齐垫圈等任务。一组机器人可以为一些协作任务共享信息。
此外,消费者还可以通过在线订购系统直接向生产机器人下定制产品订单。另一个潜在的范例是购物配送机器人系统。一旦下了订单,仓库机器人就会将物品发送给自动汽车或自动无人机,将其交付给收件人。
从那时起,"云机器人"成为了通用术语,伴随着十多年的发展,云机器人技术及其应用如何?当下与未来又有哪些机遇与挑战?
作为深耕智能机器人方向多年的产业专家,南京清湛人工智能研究院执行院长杨磊博士对此有独到见解。我们亦希望以此篇文章,讲清楚云机器人发展至今的新内涵。

图 | 南京清湛人工智能研究院执行院长 杨磊博士
一、什么是云机器人?
简单来说,云机器人就是云端技术+智能机器人技术。区别于传统的网络化的机器人技术,云机器人的核心在于,“一是如何借助于云端的算力、存储解决智能机器人之间的知识共享、信息存储问题、集体学习问题,二是如何用云端技术解决边缘人与智能机器人的交互问题。”杨磊如此介绍。
为什么机器人需要上云?这个问题,我们可以从机器人三次迭代的发展路径中看出端倪。
第一代:示教再现型机器人,即机器通过预先编程的方式重复人的操作; 第二代:感知型机器人,即复刻动作之外,机器人还可以感受环境,可识别物品的形状、大小、颜色等; 第三代:智能型机器人,这一代机器人的特点是在一定程度上具有自主感知自主决策的能力。大量新型、高性能、廉价的传感器生成的数据,支持机器人进行复杂的逻辑推理、判断及决策,并在变化的内部状态与外部环境中,自主决定自身的行为。
此时,随着机器人应用场景的复杂化、数据的海量化、机器人协同化、人机交互需求的复杂化,使得云机器人成为了更优选择。
杨磊院长在演讲中,也给云机器人下了一个更加专业的定义:“云机器人技术是借助于云计算、云存储等互联网技术和最新的人工智能感知计算技术、认知计算技术的新一代的智能机器人领域,其核心是融合基础设施和共享知识给机器人带来更为广泛的好处。”
所谓的“好处”,表现在云上现代数据中心强大的计算、存储和通信资源,赋予机器人系统强大的能力,同时也降低了成本,最终打造出轻量级、低成本、更智能的机器人。
并且不同于传统机器人,云机器人的“超级大脑”在云中,由数据中心、知识库、任务规划器、深度学习、信息处理、环境模型、通信支持等组成。
以智能汽车为例,从某种角度来说,智能汽车就是一个云机器人,它包含远程云服务解决方案,也拥有以汽车为外形的机器人主体。以特斯拉为例,后端是特斯拉自研超级计算机Dojo完成云端的计算。

智能汽车上云至少有两个方面的考虑:一是车端计算成本,二是来自于实际运行和安全方面考虑的业务需求。
从成本来看,相比传统汽车,无论是前装还是后装,车载计算模块的硬件成本必然要高出一截。这也意味着想要更加智能,只能尽可能多的将任务放在云上。
而从需求来看,车的终端可以实现部分智能,如刹车、预警等操作,而加上云上智能,则可以实现如车路协同、交通预测等等更多功能。
二、云机器人的三个关键词
据杨磊院长总结:“理解云机器人有三个关键点:知识共享、业务协同与人机交互。”
2.1 知识共享
云机器人不仅是把机器人的一些功能放在云上,更是利用云端的算力,让不同机器人之间进行知识共享,最终可以完成更复杂的事情。
早在2006年James Kuffner就曾举例说明:“如果我成功地将我的管家机器人编程为如何烹饪一个完美的煎蛋,我可以将烹饪煎蛋的软件 ‘上传到’一个服务器,然后所有的机器人在被要求烹饪煎蛋时都可以下载。”
可以看出,知识共享的意义在于加速机器人智能化、协同化的发展,拓展智能机器人的应用边界。
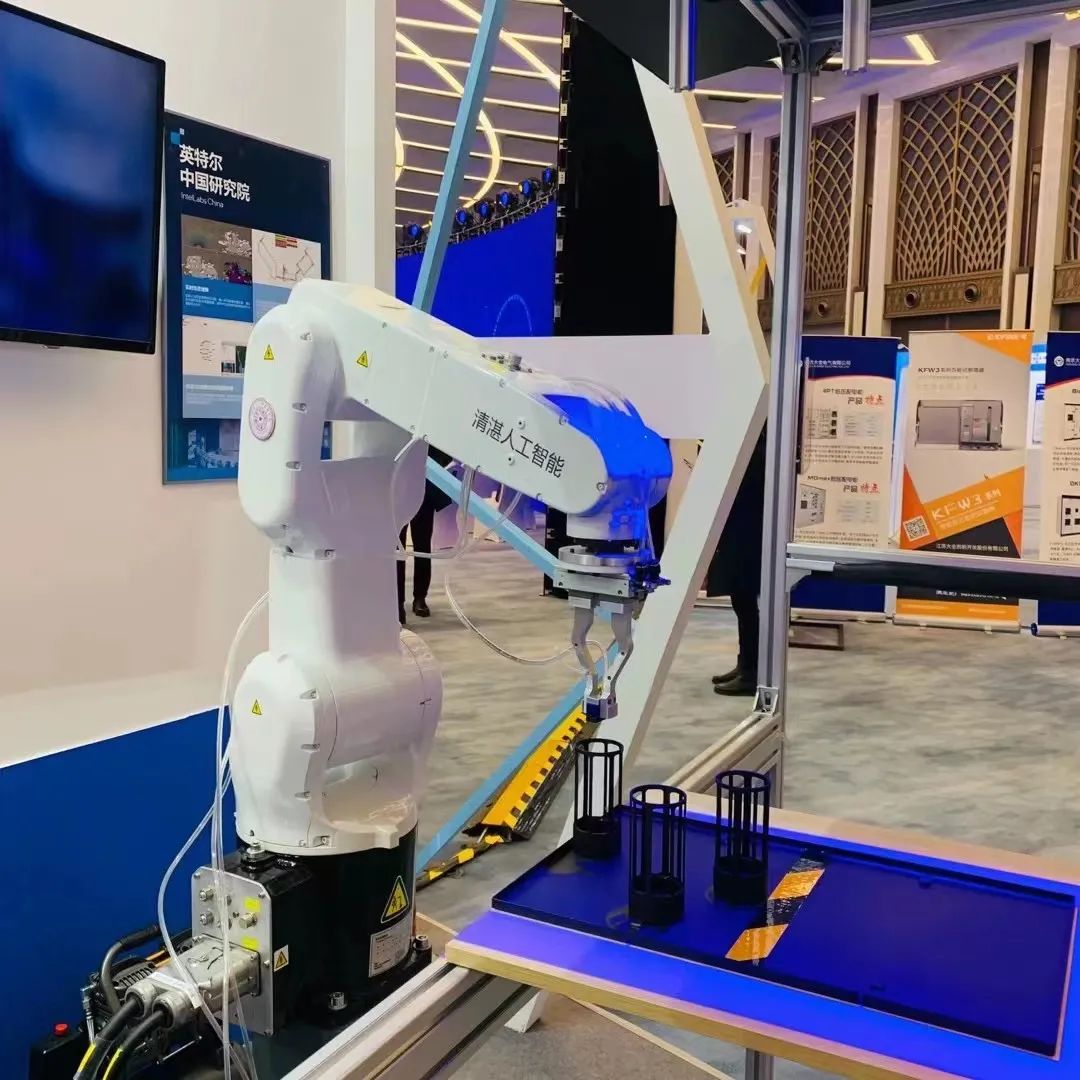
图 | 清湛研究院自研分拣机器人
“工业互联网对5G的需求使得对边端的算力和存储需求移到云端,未来我们希望通过云端强大的算力和知识共享来完成机器与人的共享协同、物理协同,云机器人就是一个很好的方向。”杨磊院长在演讲中表明。
2.2 业务协同
知识共享的目的是要实现业务协同。
相比终端机器人,云机器人更加智能。终端机器人的典型代表是送餐类机器人,这类机器人使用场景简单,路线比较固定,只需在机器人上操控即可完成指令。

图 | 清湛研究院送餐机器人
而云端机器人则适配更复杂的场景,比如巡查机器人,清湛研究院自主研发的巡查机器人,基于5G网络,目前已实现对几十万平米的电厂进行巡检。
巡查机器人有两种模式:一是自主行走,即按规划好的路线自主巡检;还有一种是通过遥操作,仓管人员远程驾驶机器人,不仅在路线上可控,在驾驶感受上,也与真实开车类似,颠簸、磕碰等,人都可以感受到。同时,通过遥操作系统,机器人不仅仅是独立工作,而且是多种不同功能的机器人协同工作。
“这就是云机制,通过云机器人这个概念增加机器和机器、人和机器的互动,相比连线、联网机器人,云机器人更多的是从智能甚至是群体智能的角度去解决问题。”

图 | 清湛研究院巡查机器人
2.3人机交互
人工智能自被提出以来,就一直被诟病不够智能,清华大学人工智能研究院院长、中国科学院院士张钹(同时也是清湛研究院院长)曾说过,“现有的机器缺乏推理能力的原因在于它没有常识。”
那谁有常识呢?人。
“机器的智能是有限的,如果机器做不到的话,就把决策交给人来决策。”杨磊院长表示,目前阶段,人+机器的交互是云机器人在实际应用中的最优方案。
依旧以智能汽车为例。自动驾驶技术的发展似乎是为了解放人类,但杨磊院长介绍,事实上人类正在以远程人工协助的方式参与到自动驾驶过程中。

据路透社报道,加利福尼亚州的法律 “要求建立双向通信联系,使制造商能够持续监测(无人驾驶)车辆的位置/状态”。也就是说,在驾驶过程中,如果遇到紧急情况,当机器与司机都无法判别时,在云端,有人可以进行远程判断和处理。
与此同时,还有更多自动驾驶出租车公司也在利用远程操作作为让车辆上路的一种方式。比如百度、小马智行等,已经或计划在自动驾驶出租车队中部署远程监控,并在车辆遇到问题时提供指导,又比如现代汽车等,也投资了相关远程操控公司,从而为自己的车队提供背后技术支持等等。
三、最后
涉及云端,“延时性”永远是一个逃不过的话题,对此,杨磊院长称,在5G环境下,延时已经可以控制在50毫秒以内,而在智能驾驶这样的场景,也已经搭载了很多云机器人方面的技术。
另一个非常重要的事情是,并不是每个场景都需要实时的遥操作。比如在有些场景下巡查机器人,如果发生机器人无法判断的场景,可以先暂停并等待人的下一步指令,再做操作,这在很多情况下可能是最优解。