学习PCL库:PCL中的配准模块介绍
将多个数据集合并成一个全局一致的模型通常使用一种称为"配准"的技术来完成。其关键思想是识别数据集之间的对应点,并找到一个最小化对应点之间距离的变换关系。由于对应点的查找受到数据集的相对位置和方向的影响,因此需要重复这个过程。一旦最小化误差降到给定的阈值以下,就可以说完成了配准。pcl_registration库实现了众多点云配准算法,适用于有序和无序点云的数据集。
【PCL】NDT点云配准(Registration)
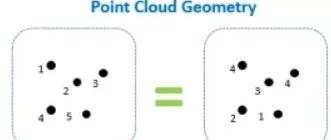
由于LiDAR一次扫描只能得到局部点云信息,为了能获得全局点云信息(如一个房间、一个三维物体),就需要进行多次连续扫描,并进行点云配准。由于每次扫描得到的点云都有独立的坐标系,因此点云配准时要进行坐标变换(旋转、平移),将多帧不同坐标系下的点云整合到一个坐标系下。