5_机械臂工具位姿计算理论及代码实现验证
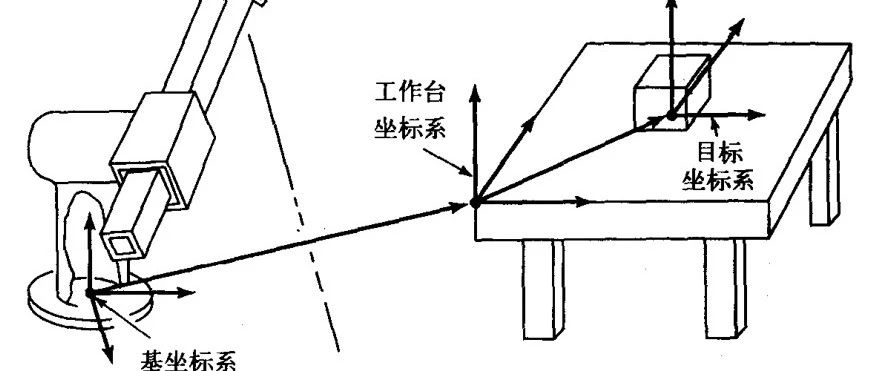
机器人的首要功能之一是能够计算它所持的夹具(或未夹持夹具)相对于规范坐标系的位姿,也就是说需要计算工具坐标系{T}相对于工作台坐标系{S}的变换矩阵。只要通过运动学方程计算出
5_机械臂工具位姿计算理论及代码实现验证
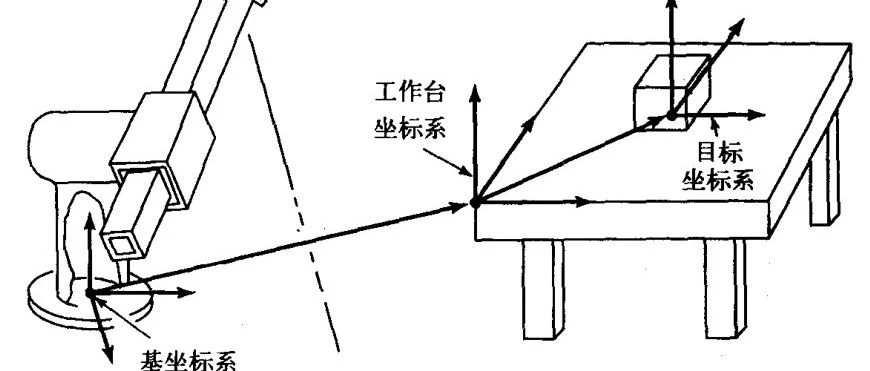
机器人的首要功能之一是能够计算它所持的夹具(或未夹持夹具)相对于规范坐标系的位姿,也就是说需要计算工具坐标系{T}相对于工作台坐标系{S}的变换矩阵。只要通过运动学方程计算出
3_机械臂位姿变换计算过程代码
有了这部分代码,可以进一步说明与验证该接口。cur_pose是机械臂基于基坐标系的位置和姿态,毫米和弧度为单位,即p_from参数。对于target_pose参数,是对p_from进行的位置和姿态的变换,例子中target_pose表示位置不变,绕ry旋转1弧度。输出结果:
面向对象有限元编程|数值计算类
python主要依赖第三方库numpy,其中np.array和np.mat有区别,主要体现在: