ECCV 2022 | 基于点云累积的动态三维场景分析
标题:Dynamic 3D Scene Analysis by Point Cloud Accumulation
三万字收藏 | 三维场景点云理解与重建技术
作者:龚靖渝, 楼雨京, 柳奉奇, 张志伟, 陈豪明, 张志忠, 谭鑫, 谢源, 马利庄
三万字收藏 | 三维场景点云理解与重建技术
作者:龚靖渝, 楼雨京, 柳奉奇, 张志伟, 陈豪明, 张志忠, 谭鑫, 谢源, 马利庄
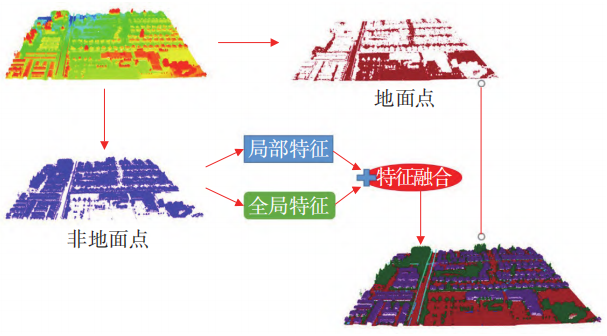
结合局部与全局特征的点云语义分割卷积网络
点云语义分割在许多与点云相关的应用程序中具有重要作用,特别是对于机载激光点云,精确的注释可大大扩展其在各种应用中的用途。然而,受限于传感器噪声、复杂的对象结构、不完整的点和不均匀的点密度,准确而有效的语义分割仍是一项艰巨的任务。因此,提出了一种结合局部与全局特征的机载激光点云语义分割网络。
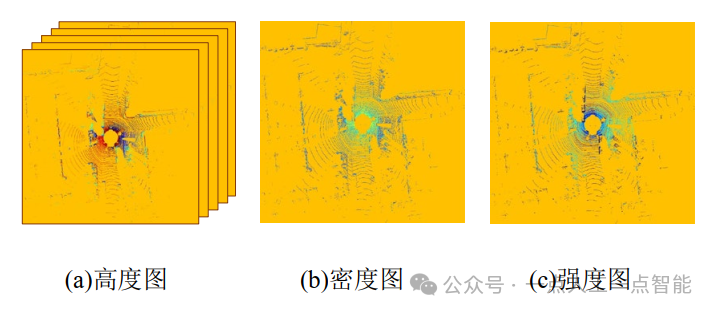
融合点云与图像的环境目标检测研究进展
在数字仿真技术应用领域,特别是在自动驾驶技术的发展中,目标检测是至关重要的一环,它涉及到对周围环境中物体的感知,为智能装备的决策和规划提供了关键信息。
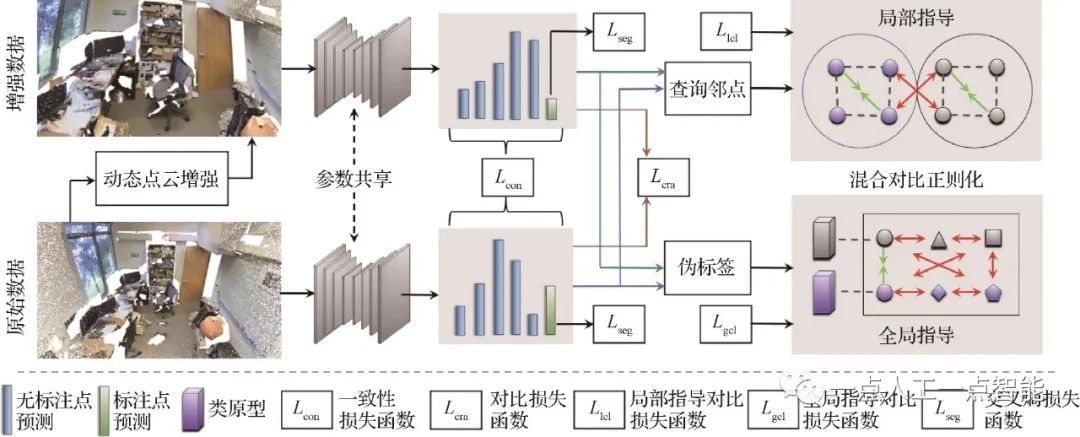
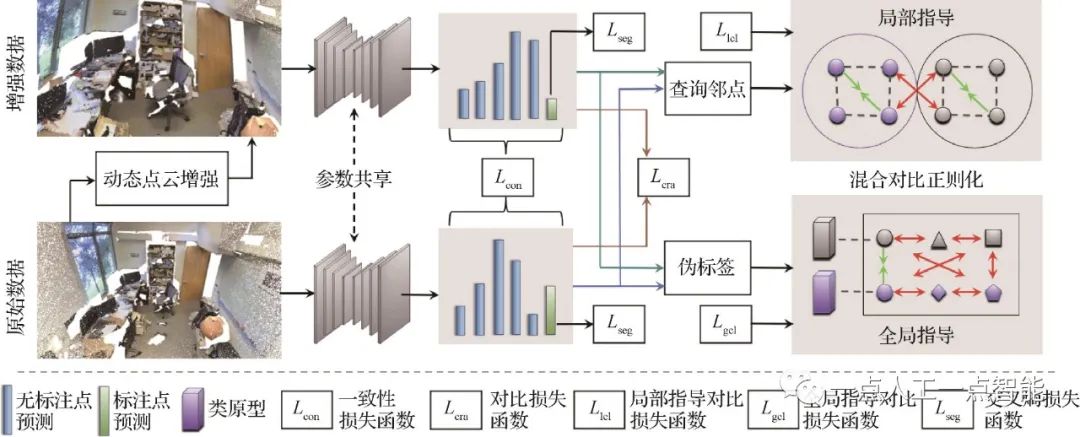
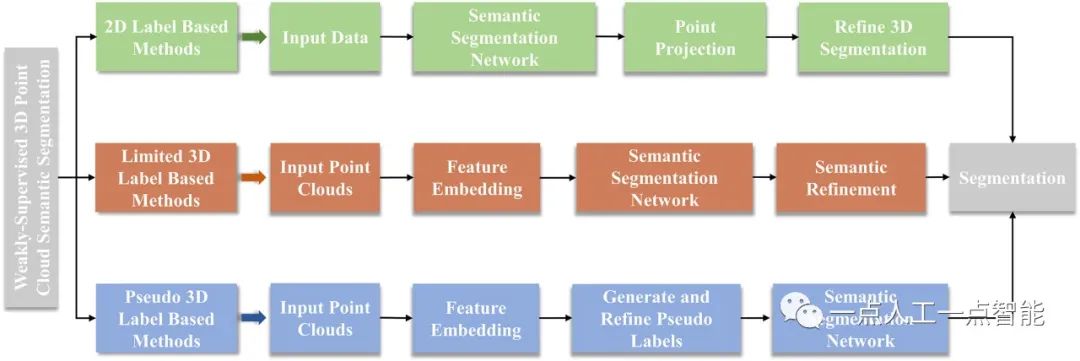
弱监督三维点云语义分割研究综述
作者:Jingyi Wang, Yu Liu, Hanlin Tan, Maojun Zhang
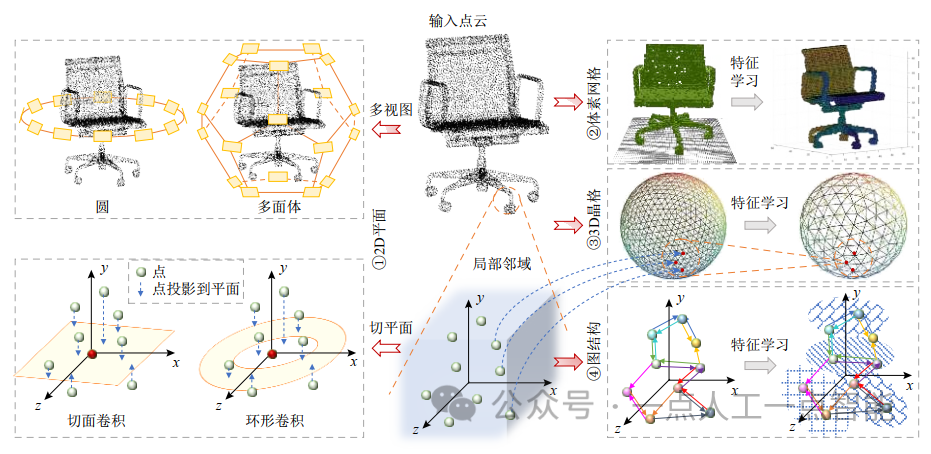
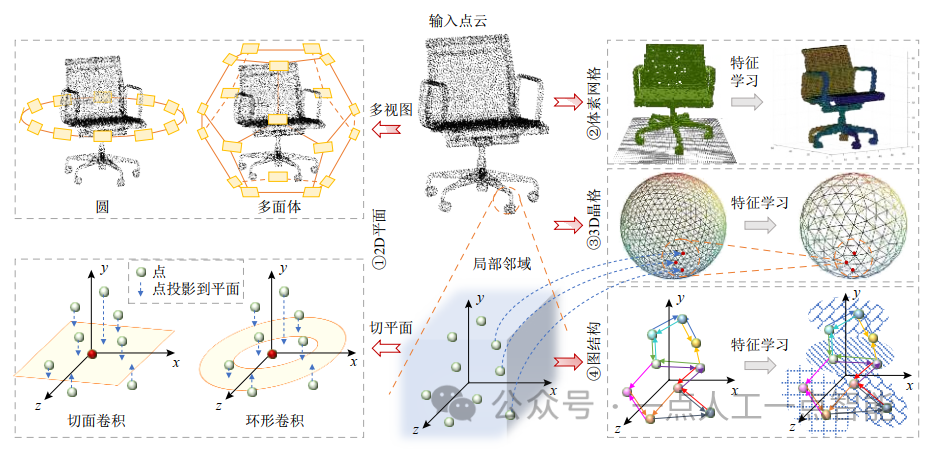
基于三维点云的卷积运算综述
3D传感器(如激光雷达和深度相机)的普及引起了人们对3D视觉的广泛关注,这些传感器采集的3D数据可以提供丰富的几何结构和尺度细节,这也在许多领域得到了实际应用,包括自动驾驶技术[1]、机器人控制技术[2]等。
基于三维点云的卷积运算综述
3D传感器(如激光雷达和深度相机)的普及引起了人们对3D视觉的广泛关注,这些传感器采集的3D数据可以提供丰富的几何结构和尺度细节,这也在许多领域得到了实际应用,包括自动驾驶技术[1]、机器人控制技术[2]等。