快乐学AI系列——计算机视觉(4.篇外)什么是“卷积神经网络”
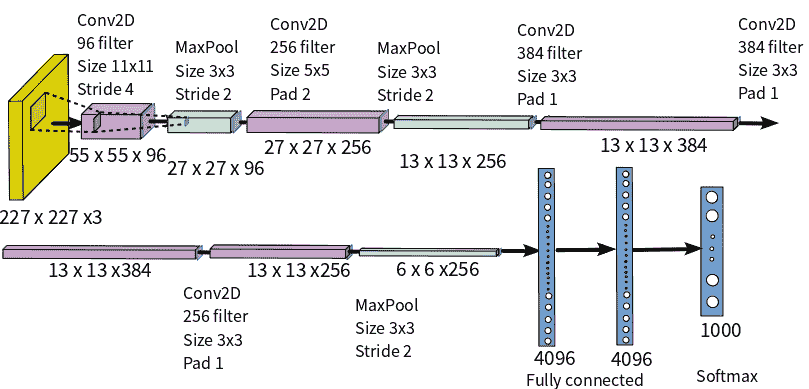
卷积神经网络(Convolutional Neural Network,CNN)是一种深度学习算法,常用于计算机视觉领域的图像分类、目标检测和图像分割任务中。它的核心思想是通过卷积运算从原始数据中提取特征,然后将这些特征传递给全连接层进行分类或回归。

快乐学AI系列——计算机视觉(4.篇外)什么是“卷积神经网络”
卷积神经网络(Convolutional Neural Network,CNN)是一种深度学习算法,常用于计算机视觉领域的图像分类、目标检测和图像分割任务中。它的核心思想是通过卷积运算从原始数据中提取特征,然后将这些特征传递给全连接层进行分类或回归。
快乐学AI系列——计算机视觉(4.篇外)什么是“卷积神经网络”
卷积神经网络(Convolutional Neural Network,CNN)是一种深度学习算法,常用于计算机视觉领域的图像分类、目标检测和图像分割任务中。它的核心思想是通过卷积运算从原始数据中提取特征,然后将这些特征传递给全连接层进行分类或回归。
【腾讯云HAI域探秘】搭建一个永不宕机的本地SD文本生成图像应用--喂饭级高性能应用HAI部署stable diffusion webui 一键文生图
本次有幸受邀作为新品先锋体验官参加了【腾讯云HAI域探秘】活动,沉浸式体验高性能应用服务HAI产品 + Stable Diffusion WebUI部署。
别再追捧AI概念,来看腾讯AI商业化实践
导语 | AI的价值,要从实践中追寻。从1956年达特茅斯会议上的学术概念,到今天在人脸识别、智能客服、智能家居、医疗诊疗、工业机器人、无人驾驶等领域的多点开花,AI技术跨过了从概念到落地的鸿沟。AI技术商业化的代表是什么?它们是如何跨越的这道鸿沟?产学研一体化将给AI商业化带来怎样的助力?未来AI领域可能的商业化风口是什么?一切问题的答案,都在本次TVP技术闭门里。
AI元年,始于1956年
1956年,达特茅斯会议上,与会科学家们探讨了这样一个主题:用机器来模仿人类学习以及其他方面的智能。这次为期2

基于3D激光雷达的SLAM算法研究现状与发展趋势
SLAM算法是移动机器人实现自主移动的关键环节。激光雷达(LiDAR)具有测距精度高、不易受外部干扰和地图构建直观方便等优点,广泛应用于大型复杂室内外场景地图的构建。随着3D激光器的应用与普及,国内外学者围绕基于3D激光雷达的SLAM算法的研究已取得丰硕的成果。
基于车载点云数据的城市道路特征目标提取与三维重构
城市道路作为交通基础设施的重要组成部分,其数字化建模是智慧交通、自动驾驶以及基础设施变形监测等领域发展的必要前提[1]。尽管发达国家的道路建设已达到相对饱和的状态,但针对既有道路的快速、准确的数字化模型重建仍是研究的重点。在这方面,三维激光扫描技术通过激光雷达系统采集待测区域的点云数据,进而成为实现高精度重建的重要手段[2]。

计算机视觉之三维重建篇.8(运动恢复结构-仿射)
📷
📷
📷
📷
📷
📷
📷
📷
📷
📷
📷
📷
📷
📷
📷
📷
📷
📷
📷
📷
📷
📷
计算机视觉之三维重建篇.8(运动恢复结构-仿射)
📷
📷
📷
📷
📷
📷
📷
📷
📷
📷
📷
📷
📷
📷
📷
📷
📷
📷
📷
📷
📷
📷
重磅活动 | 腾讯云智能推出首期《人工智能集训营》
近些年,AI发展势头有目共睹。作为“下一个十年”最核心的科技手段之一,已然是行业共识和大势所趋,当下也正在加速渗透到千行百业与大众生活中。

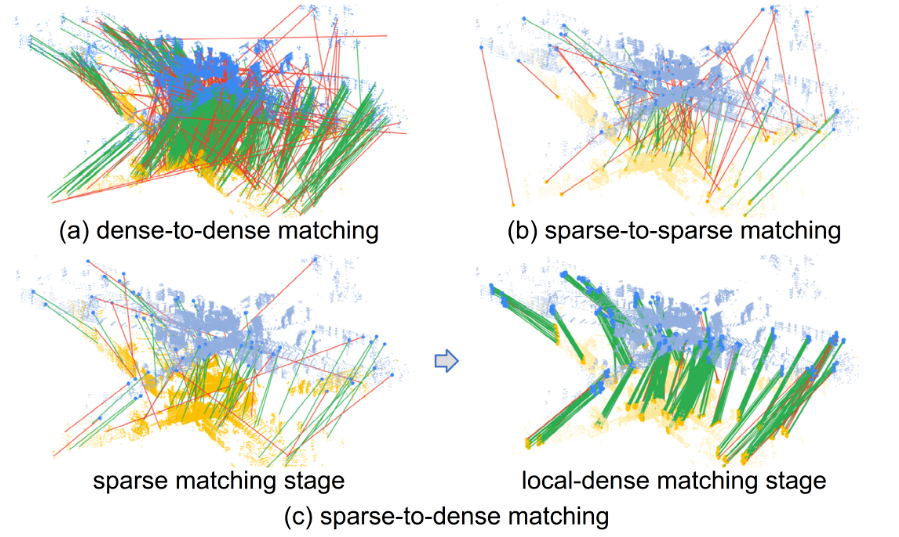
SDMNet:大规模激光雷达点云配准的稀疏到稠密匹配网络
自动驾驶车辆需要准确地感知和理解周围环境,相比于二维的视觉感知,三维视觉感知提供了更多的信息和更准确的空间建模能力。而点云配准是三维视觉感知中的一项基本问题,在自动驾驶中的地图、定位等方面有着重要作用。基于特征匹配的配准算法是点云配准领域的核心框架之一,其主要基于特征相似度求解匹配点对,并结合鲁棒匹配算法得到最终的配准结果,该框架更能够适应自动驾驶场景,但大规模且复杂的点云场景也对点云配准算法的效率和准确性提出了更高的要求。

SDMNet:大规模激光雷达点云配准的稀疏到稠密匹配网络
自动驾驶车辆需要准确地感知和理解周围环境,相比于二维的视觉感知,三维视觉感知提供了更多的信息和更准确的空间建模能力。而点云配准是三维视觉感知中的一项基本问题,在自动驾驶中的地图、定位等方面有着重要作用。基于特征匹配的配准算法是点云配准领域的核心框架之一,其主要基于特征相似度求解匹配点对,并结合鲁棒匹配算法得到最终的配准结果,该框架更能够适应自动驾驶场景,但大规模且复杂的点云场景也对点云配准算法的效率和准确性提出了更高的要求。
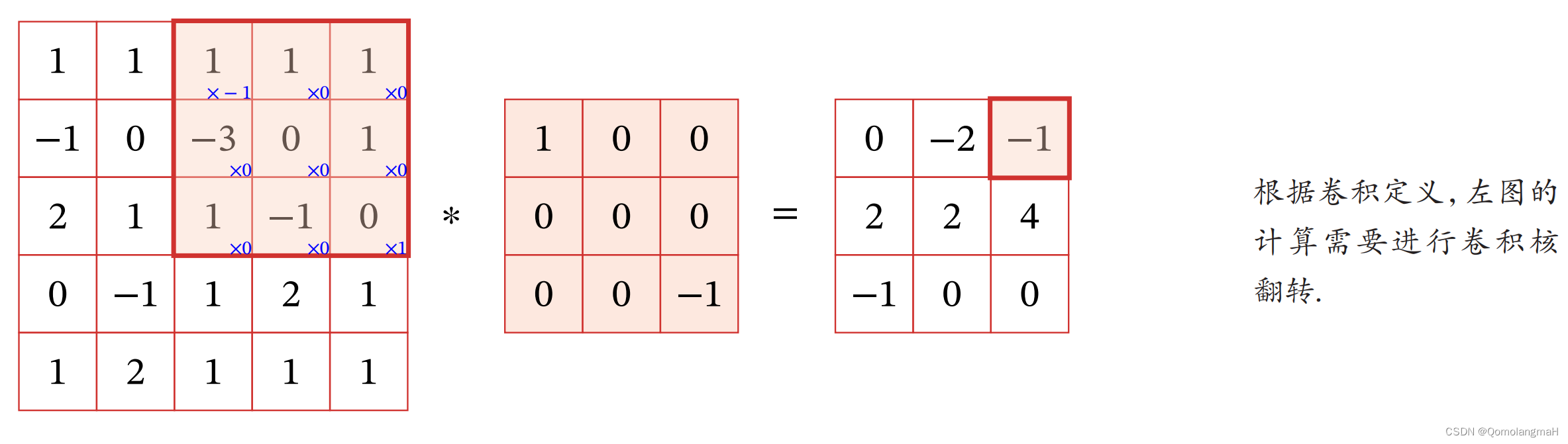
【计算机视觉】三、图像处理——实验:图像去模糊和去噪、提取边缘特征
二维卷积运算是信号处理和图像处理中常用的一种运算方式,当给定两个二维离散信号或图像
重磅活动 | 腾讯云智能推出首期《人工智能集训营》
近些年,AI发展势头有目共睹。作为“下一个十年”最核心的科技手段之一,已然是行业共识和大势所趋,当下也正在加速渗透到千行百业与大众生活中。

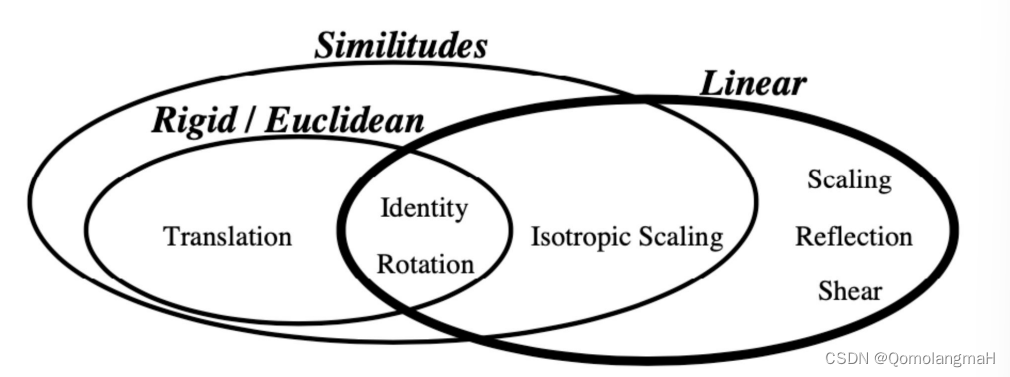
【计算机视觉】二、图像形成:2、几何基元和几何变换:2D变换
几何基元是计算机图形学中最基本的图形对象,它们是构建更复杂图形的基础单元。常见的几何基元包括:
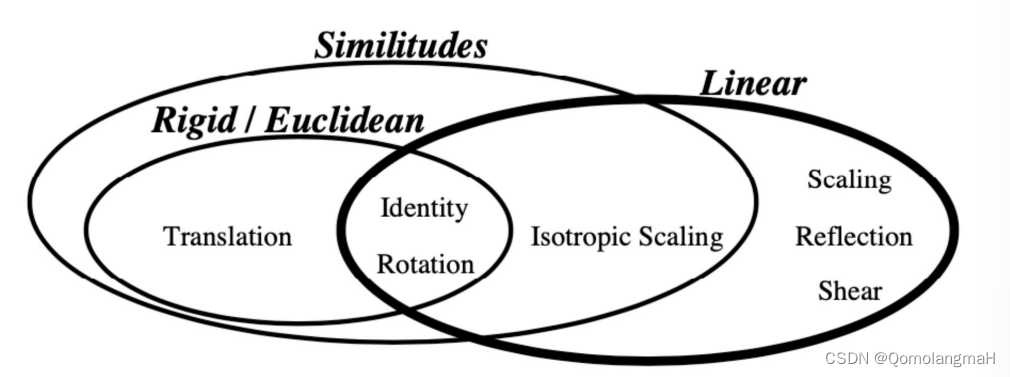
【计算机视觉】二、图像形成:2、几何基元和几何变换:2D变换
几何基元是计算机图形学中最基本的图形对象,它们是构建更复杂图形的基础单元。常见的几何基元包括:
【直播预告】1H速成系列之图像分类
计算机视觉(CV)是当下人工智能落地最广泛的领域,也一直是目前深度学习最热的研究领域。人的大脑皮层, 有近 70% 都是在处理视觉信息,是人类获取信息最主要的渠道。在计算机视觉(CV)出现之前,图像对于计算机来说是黑盒的状态。如果计算机想要在现实世界发挥重要作用,就必须看懂图像里的内容!这就是计算机视觉(CV)要解决的问题。
图像分类作为计算机视觉(CV)中最基础的一个任务,它的目标是将不同的图像划分到不同的类别,实现最小的分类误差。理解图像分类的逻辑可以快速帮助AI小白入门计算机视觉领域(CV)。
图像分

精通 TensorFlow 2.x 计算机视觉:第二部分
在本节中,您将基于在上一节中学到的知识来执行复杂的计算机视觉任务,例如视觉搜索,对象检测和神经样式迁移。 您将巩固对神经网络的理解,并使用 TensorFlow 进行许多动手的编码练习。
精通 TensorFlow 2.x 计算机视觉:第三、四部分
在本节中,您将基于从上一节中获得的理解,并开发更新的概念并学习用于动作识别和对象检测的新技术。 在本节中,您将学习不同的 TensorFlow 工具,例如 TensorFlow Hub,TFRecord 和 TensorBoard。 您还将学习如何使用 TensorFlow 开发用于动作识别的机器学习模型。
计算机视觉之三维重建篇.2(摄像机标定)
计算机视觉之三维重建篇.1
📷
📷
📷
📷
📷
📷
📷
📷
📷
📷
📷
📷
📷
📷
📷
📷
📷
📷
📷
📷
📷
📷
📷
📷
📷
📷
📷
📷
📷
📷
📷
📷
📷
📷
📷
📷
📷
📷
📷
📷
📷
📷
📷
📷
花花呀~