RoLM: 毫米波雷达在激光雷达地图上的定位
作者:Yukai Ma , Xiangrui Zhao , Han Li , Yaqing Gu , Xiaolei Lang ,Yong Liu

HBP人脑计划结果如何:欧洲投入6亿欧元利用计算机重建人脑?
为期十年的人脑计划将在九月份结束。《Nature》杂志审视了它的成就和动荡的过去。
HBP人脑计划结果如何:欧洲投入6亿欧元利用计算机重建人脑?
为期十年的人脑计划将在九月份结束。《Nature》杂志审视了它的成就和动荡的过去。
Colmap-PCD:一种用于图像到点云配准的开源工具
文章:Colmap-PCD: An Open-source Tool for Fine Image-to-point cloud Registration

基于3D激光雷达的SLAM算法研究现状与发展趋势
SLAM算法是移动机器人实现自主移动的关键环节。激光雷达(LiDAR)具有测距精度高、不易受外部干扰和地图构建直观方便等优点,广泛应用于大型复杂室内外场景地图的构建。随着3D激光器的应用与普及,国内外学者围绕基于3D激光雷达的SLAM算法的研究已取得丰硕的成果。
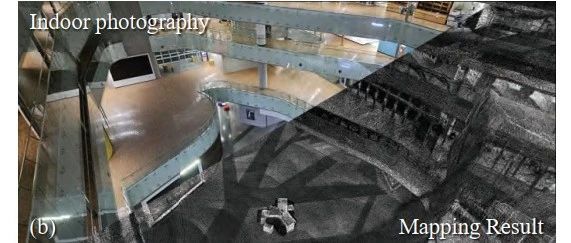
NV-LIO:一种基于法向量的激光雷达-惯性系统(LIO)
论文:NV-LIO: LiDAR-Inertial Odometry using Normal Vectors Towards Robust SLAM in Multifloor Environments
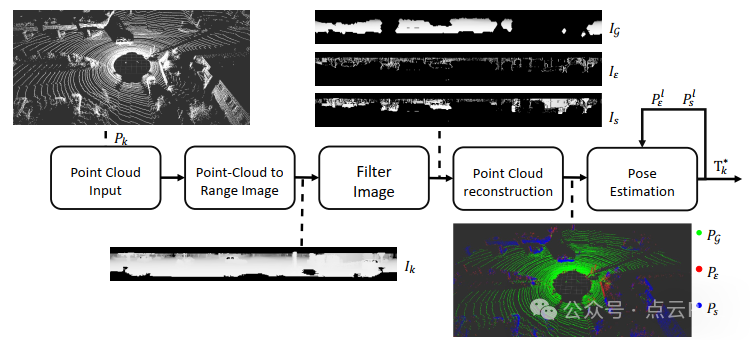
LiLO:基于深度图滤波的轻量且低偏差的激光雷达里程计方法
文章:LiLO: Lightweight and low-bias LiDAR Odometry method based on spherical range image filtering
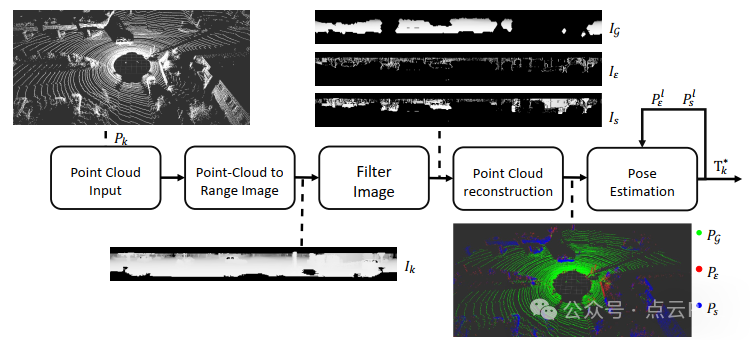
LiLO:基于深度图滤波的轻量且低偏差的激光雷达里程计方法
文章:LiLO: Lightweight and low-bias LiDAR Odometry method based on spherical range image filtering
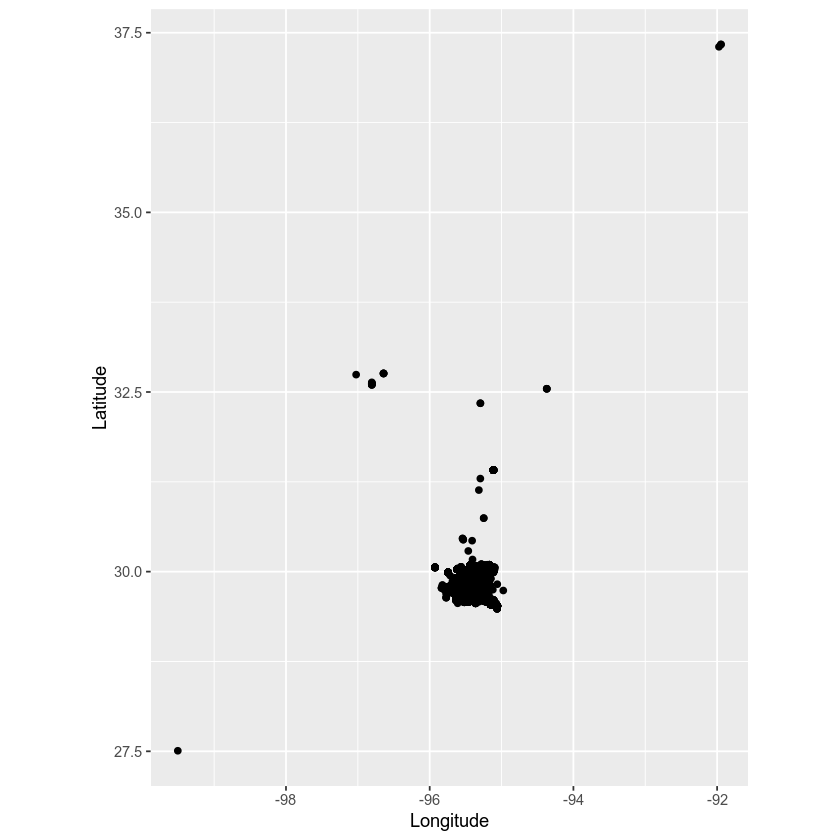
Google Earth Engine——在 R 中计算和绘制二维空间点密度
快速计算点密度的度量并将其显示在地图上通常很有用。在本教程中,我们将使用 ggmap R 包中包含的德克萨斯州休斯顿的犯罪数据来演示这一点。
基于全局特征描述子的激光SLAM回环检测方法
同步定位和建图(SLAM)是实现机器人在未知环境下的定位和移动的重要技术方法[1]。定位精度是井下巡检的核心指标,高精度的定位算法是巡检过程中导航和避障的基础。但井下环境复杂,具有低照度、弱纹理、图像特征难以识别的特点[2],给基于视觉的SLAM算法带来了极大的困难。而激光SLAM算法测量距离远、精度高,利用环境的结构特征进行定位[3],在井下环境中更具应用前景[4-5]。

OmniColor: 基于全局相机位姿优化给LiDAR点云着色方法
文章:OmniColor: A Global Camera Pose Optimization Approach of LiDAR-360Camera Fusion for Colorizing Point Clouds

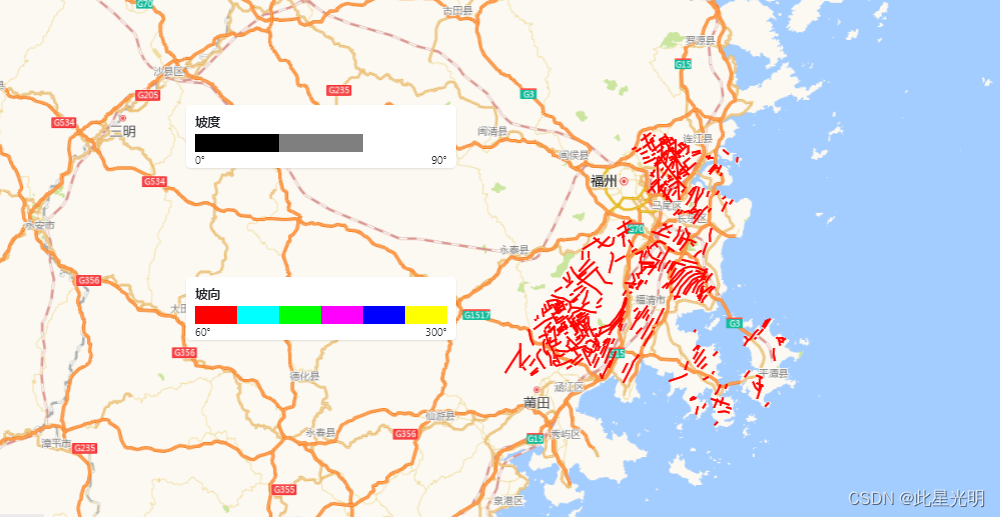
PIE-engine 教程 ——坡度、坡向、山阴、粗糙度计算和显示案例分析
本次我们的教程主要市通过加载全国的矢量边界和遇上传的栅格数据,并通过上传的DEM数据进行相应的山阴、坡度、坡向数据,这里我们首先需要看几个函数:
Google Earth Engine(GEE)——Landsat8 SR数据除云
上一次讲了Google Earth EngineLandsat4/5/7 SR数据除云,这次讲一下Landsat8 SR数据除云,

GEE代码实例教程详解:MODIS土地覆盖分类与面积计算
在本篇博客中,我们将使用Google Earth Engine (GEE) 对MODIS土地覆盖数据进行分析。通过MODIS/061/MCD12Q1数据集,我们可以识别不同的土地覆盖类型,并计算每种类型的总面积。
云服务商正在杀死开源商业模式
对程序员圈子来说,Mapbox是一家专注于地图绘制的卓越软件公司。从Mapbox GL JS(他们的2D地图渲染器)到自动驾驶和导航库,再到增强现实、3D可视化,甚至视频游戏技术,Mapbox在这一领域做到非常棒,其创新成果占有巨大的市场份额。而且这些内容都是开源的,也是让众多程序员喜欢他们的原因之一。
但是昨天看到了一个让我震惊的新闻:最新版本的Mapbox GL JS将不再是开源的!!!
作为个人来说,我并非是一个完美的热衷于开源的粉丝,因为我知道,创建和维护开源代码是多么一件吃力不讨好的事情,真的是非

云服务商正在杀死开源商业模式
对程序员圈子来说,Mapbox是一家专注于地图绘制的卓越软件公司。从Mapbox GL JS(他们的2D地图渲染器)到自动驾驶和导航库,再到增强现实、3D可视化,甚至视频游戏技术,Mapbox在这一领域做到非常棒,其创新成果占有巨大的市场份额。而且这些内容都是开源的,也是让众多程序员喜欢他们的原因之一。
但是昨天看到了一个让我震惊的新闻:最新版本的Mapbox GL JS将不再是开源的!!!
作为个人来说,我并非是一个完美的热衷于开源的粉丝,因为我知道,创建和维护开源代码是多么一件吃力不讨好的事情,真的是非

WRFOUT 涡度平流和温度平流计算与可视化
涡度平流和温度平流是两种常见的气象诊断量,可以帮助我们更好地理解大气运动和热力学过程。
以下代码将计算上述气象诊断量并可视化。

如何生成炫酷的词云(已验证)
wordcloud是python的一个第三方库,称为词云也叫做文字云,是根据文本中的词频,对内容进行可视化的汇总,可以用来绘制用户画像。
python计算与绘制WRF降水量
1.使用os库循环读取文件夹下的wrf数据,并用nc库的dataset读取,可使用wrf_list = [Dataset(f) for f in wrf_files] ,wrf_files是os读取形成的文件列表

python计算与绘制WRF降水量
1.使用os库循环读取文件夹下的wrf数据,并用nc库的dataset读取,可使用wrf_list = [Dataset(f) for f in wrf_files] ,wrf_files是os读取形成的文件列表
